全部
▼
热搜:
 509
509
 0
0
一种根据本发明的重载车辆(2)包括:A)履带传动装置(1、1'),车辆的其余部分能够在履带传动装置(1、1')上滚动以便移动;B)至少一个传感器(100、100'、100"、100III),其配置为检测重载车辆(2)的履带传动装置(1)本身或所包含的环境的物理量或者履带传动装置(1)或重载车辆的周围的物理量;C)电源供应单元(102),其配置为向传感器供应电力。电源供应单元(102)包括整流天线(1020),整流天线(1020)配置为从外部电磁源(104)接收电磁功率并且向传感器(100、100'、100"、100III)供应电磁功率的至少一部分。本发明还涉及履带传动装置、履带板、履带链节、用于这种车辆的底盘总成。
 516
0
516
0
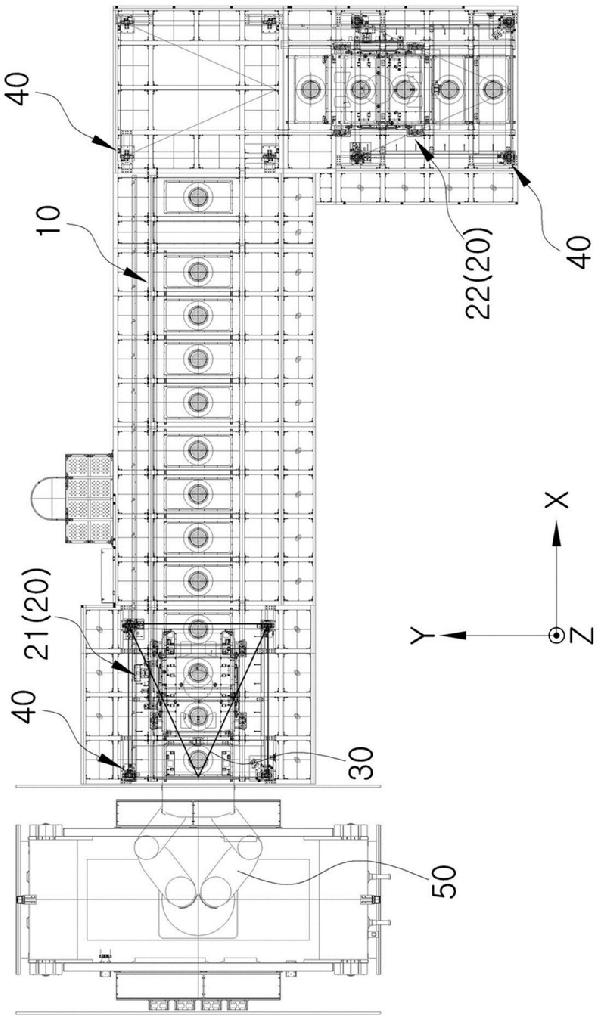
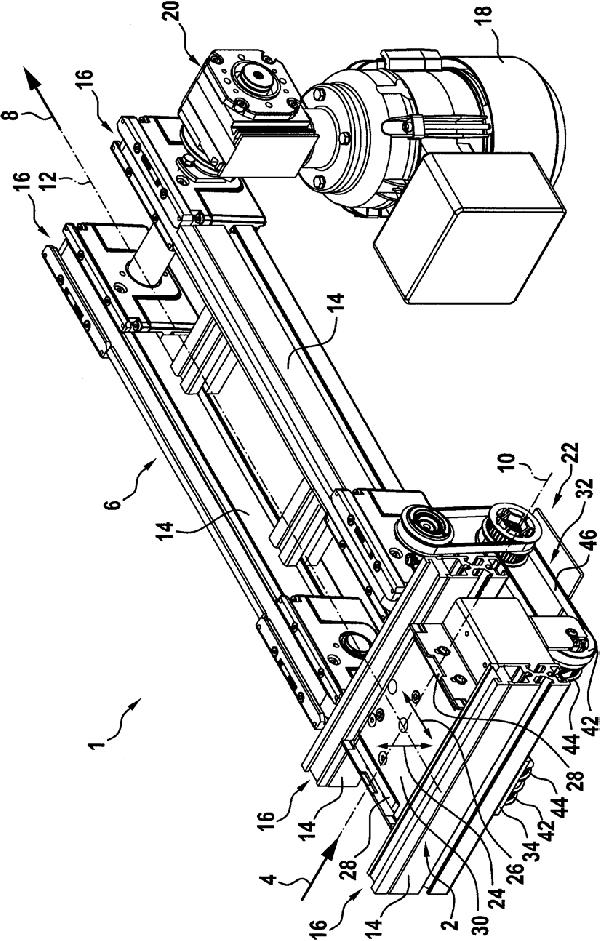
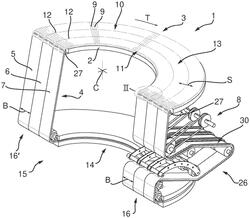
本发明涉及一种具有提升体的提升及输送装置,循环的输送器件在所述提升体上朝输送轨道转向,在所述输送轨道上能够输送物资,并且所述提升体为了所述输送轨道的升程而由所述装置的线性驱动装置能够铰接或者铰接。此外,本发明涉及一种具有这样的提升及输送装置的路段输送机。
 850
0
850
0
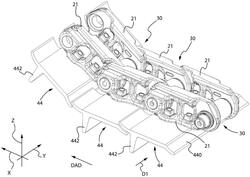
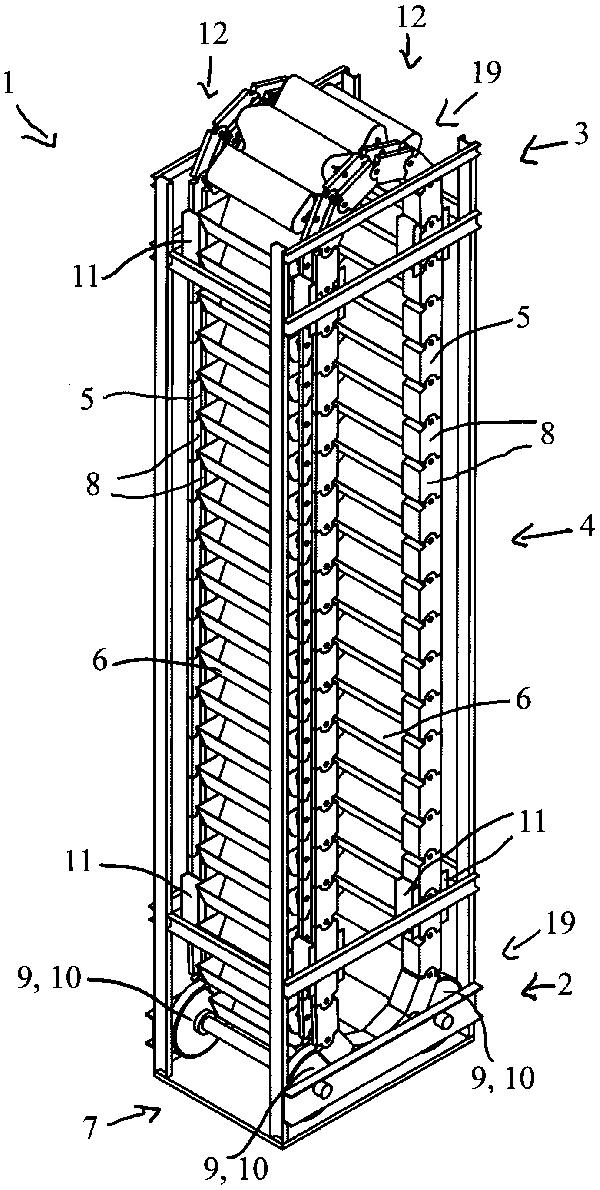
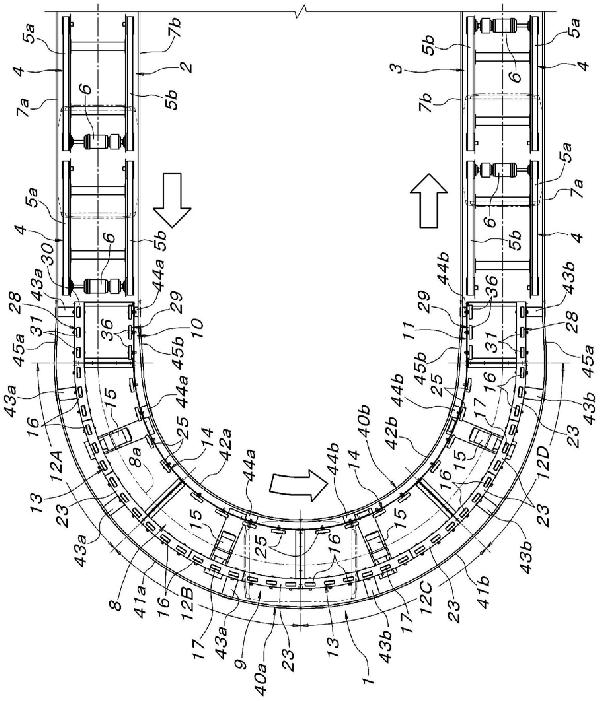
本发明涉及用于在竖向上连续输送物料尤其是散料的立式输送机(1),具有至少一个在输送机尾(2)和在竖向上位于其上方的输送机头(3)之间连续循环的输送道(4),该输送道包括至少一个驱动部件和多个安装在该驱动部件上的用于容装物料的输送部件(6)尤其是料斗,该立式输送机还具有至少一个用于驱动所述至少一个驱动部件以在循环平面内循环运动的驱动机构(7)。该输送机的特点是,该驱动部件是推力链(5),其中推力链(5)的链节(8)被设计成防止在循环平面内相对于相邻的链节(8)向外弯曲超过180°回转角,并且设置有至少一个支座(9),自身连续的推力链(5)以在该推力链(5)的循环平面内朝外的一外侧面贴靠该支座,其中该支座(9)在推力链(5)循环运动时转动。
 344
0
344
0
一种双轴模块化输送带,包括正交的两个带环,所述两个带环在运载路径上在结合部处相交。带由成行和列布置的矩形带模块构造。模块通过铰链元件互连,铰链元件允许行进的带环的列相对于另一静止的带环的行平移。
 690
0
690
0
曲线输送机(1),该曲线输送机包括沿着圆弧(2)延伸的导轨,该导轨引导环形输送机(4)的输送部分(3),输送部分包括多个链股(5、6、7),这些链股利用公共曲率中心(C)以相等的径向节距间隔开;以及与链股协配的驱动器,该驱动器(8)在操作期间以相互相等的角速度引导链股通过导轨,其中,链股各自由单个一系列连续的输送机模块(9)构成,这些输送机模块各自在其顶部处设置有基本上平坦的顶表面,并且其中,链股之间的径向节距基本上对应于输送机模块的径向宽度,使得输送机模块的侧部毗连而封围一个窄的间隙,并且在输送部分中的顶表面形成基本上不间断的输送表面。
 545
0
545
0
用于输送货物物品的输送机系统,具有用于容纳货物物品的至少一个运输容器以及用于容纳和输送运输容器的受控可驱动和可移动的无人驾驶运输单元;其中,运输单元包括:卸货装置,用于从运输容器卸载位于已容纳的运输容器上的货物物品;以及保持机构,用于在运输容器和运输单元之间建立可分离的连接,借助于所述保持机构,运输容器待被保持在运输单元上。
 788
0
788
0
提供能够活用在主要处理宽度或长度特定的平面视角为长方形的托盘的输送路径中的水平弯曲路径部作为托盘输送装置的一种曲线输送带。该曲线输送带(1)是设置于输送路径中的水平弯曲路径部(8),其包含:相对于通过该水平弯曲路径部(8)的路径宽度中心的圆弧形中心线(8a)具有圆弧中心的内侧上沿着该水平弯曲路径部(8)配置的内侧惰轮列(14),以及相对于该圆弧形中心线(8a)与具有圆弧中心的一侧相反的外侧上沿着水平弯曲路径部(8)配置的外侧驱动轮列(13),并构成为圆弧形中心线(8a)至外侧驱动轮列(13)的间距是小于圆弧形中心线(8a)至内侧惰轮列(14)的间距。
 707
0
707
0
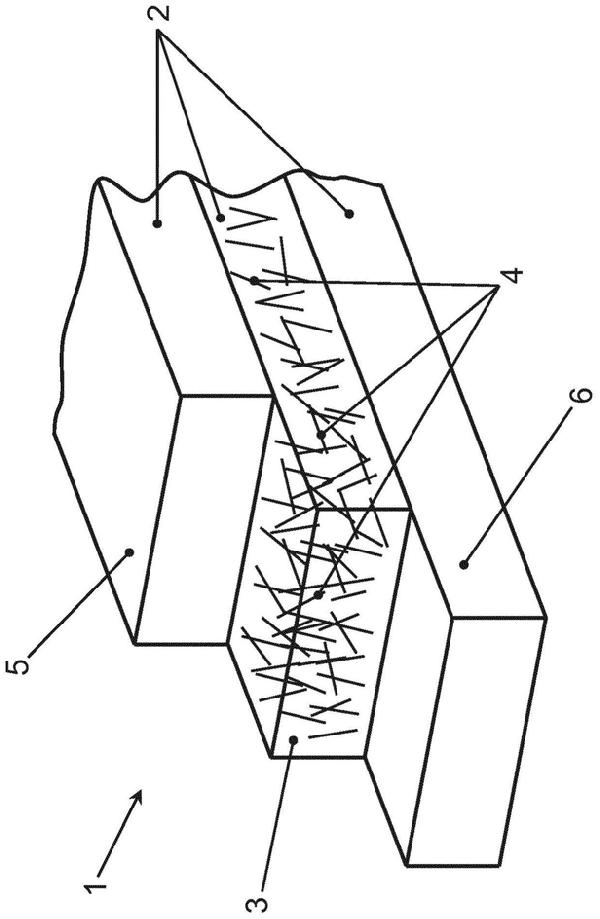
本发明涉及一种用于制造和/或回收利用输送带(1)的方法,其中,所述输送带(1)具有至少一个带层(2),所述带层(2)或其中一个所述带层(2)构造为拉伸载体(3),并且所述拉伸载体(3)至少由基质材料和嵌入所述基质材料中的丝状物(4)制成,其中,所述方法包括:制备拉伸载体原材料,这是通过制备已经包含丝状物(4)或丝状物组的回收物或将已经包含丝状物(4)或丝状物组的回收物与基质材料和/或丝状物合并或将基质材料与丝状物(4)合并实现的;通过对制备好的拉伸载体原材料的借助机械手段的混合和对制备好的拉伸载体原材料的温度调节,形成所述拉伸载体原材料的可挤出成型的状态;和由拉伸载体原材料挤出成型拉伸载体(3),以构成输送带(1)的至少一个带层(2);或由拉伸载体原材料挤出成型拉伸载体(3),以构成输送带(1)的其中一个带层(2),并且将所述拉伸载体(3)与至少另一个带层(2)连接成输送带(1)。此外,本发明包括一种用于实施根据本发明的方法的输送带(1),其中,拉伸载体(3)的基质材料和/或输送带(1)的带层材料具有比置入拉伸载体(3)中的丝状物(4)更低的熔融温度。
 791
0
791
0
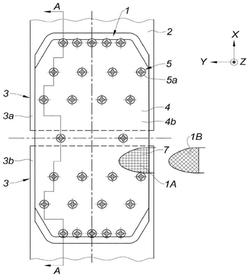
本发明涉及一种用于输送带(2)的接合装置(1),用于连接至少一个纵向输送带(2)的两端(3),所述接合装置(1)包括至少两个接合板(4),每个接合板(4)构造成每个接合板覆盖输送带(2)端部(3)的单独一侧,使得所述输送带(2)在装配操作位置上布置在两个接合板(4)之间,接合板(4)通过附接装置(5)固定在一起,所述附接装置(5)分别穿过接合板(4)、输送带(2)的一端(3)和另一接合板(4),每个接合板(4)由柔性、弹性材料(6)制成并设有增强件(7),所述增强件(7)由至少一个织物层形成,所述接合装置(1)的特征在于所述增强件(7)由横向边缘(8)纵向限定,所述增强件(7)相对于装配位置处的所述输送带(2)横向延伸,每个所述横向边缘(8)具有解织支撑件(9),以防止在使用接合装置(1)时增强件(7)的解织。
 308
0
308
0
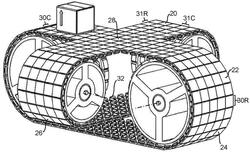
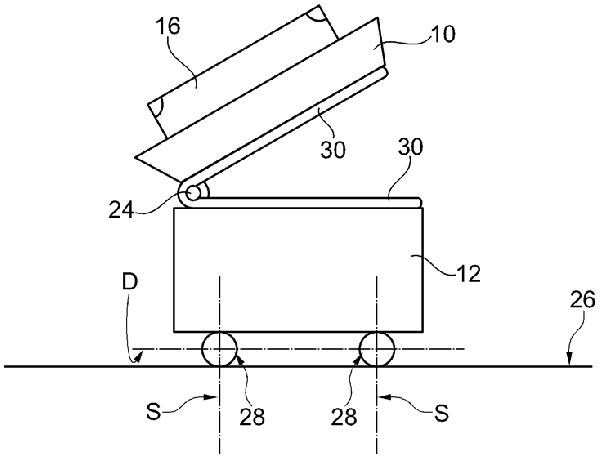
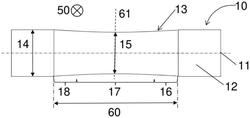
本发明涉及一种用于输送带(20、24、25)的运载滚轮(10、31、32、33),其中,运载滚轮(10、31、32、33)设计为围绕旋转轴线(11)旋转并且包括具有滚轮支撑区域(13)的辊元件(12),滚轮支撑区域配置为向输送带(20、24、25)提供滚动支撑。滚轮支撑区域(13)关于运载滚轮(10、31、32、33)的旋转轴线(11)旋转对称并且沿着所述滚轮支撑区域的轴向延伸具有包括滚轮支撑区域(13)的最大直径(14)和滚轮支撑区域(13)的最小直径(15)的不同直径。此外,滚轮支撑区域(13)的最小直径(15)至少为滚轮支撑区域(13)的最大直径(14)的95%并且至多为99.8%。本发明还涉及运载滚轮站(30)、带式输送系统以及用于支撑和引导槽式或卷式的运动的输送带(24、25)。
 1137
0
1137
0
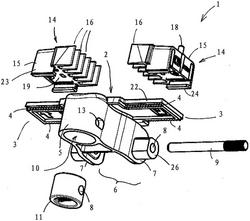
本发明涉及一种用于链式输送机的链节(1),所述链式输送机用于输送小型部件(17)、特别是瓶封闭件,所述链节具有用于小型部件的特别是平坦的支承面,其中,在所述链节的相对置的各侧上设置有用于套装至少一个携动件(14)的器件(3)。这能实现无损坏地输送小型部件,另一方面所述链节(1)可以简单地与不同类型的小型部件相适配,所述小型部件例如在直径和/或高度方面有所不同。在此,设置有至少两个携动件(14),各所述携动件分别具有固定部件(15)以及抓持部件(19),所述固定部件能套装到用于套装的所述器件(3)上,所述抓持部件由比所述固定部件(15)软的材料制造并且具有一个或多个突起(16),所述突起在所述携动件(14)的套装状态中朝向相应另外的携动件(14)定向。
 644
0
644
0
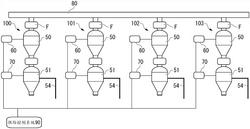
本发明的矿石连续供给装置具有多个矿石供给机构,该矿石供给机构具备:压力调节罐(50),暂时积存粉体矿石;提升罐,从压力调节罐(50)接收矿石,并向冶炼炉排出;及压力控制系统,以在压力调节罐(50)的矿石接收期间及向提升罐(51)的矿石排出期间从提升罐向冶炼炉连续供给矿石的方式,控制压力调节罐(50)及提升罐(51)的压力,从搬入矿石的输送机的上游侧到下游侧,多个矿石供给机构(100)~(103)并联连接于输送机,矿石连续供给装置设置有供给控制机构,所述供给控制机构以从上游侧到下游侧依序进行矿石供给机构的矿石接收的同时,在下游端的矿石供给机构结束矿石接收之前,上游端的矿石供给机构开始矿石接收的方式控制矿石的供给。
 1025
0
1025
0
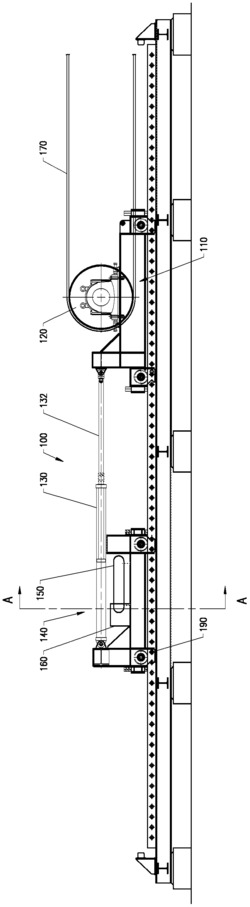
一种张紧系统,其将传送机的环形带的张力保持在目标范围内。张紧系统可以包括可移动托架,该可移动托架支撑向传送带提供张力的卷取滑轮。张紧系统还可包括支撑在可重新定位的推车上的各种液压部件。一个示例性液压部件是液压缸,该液压缸在可移动托架与可重新定位的推车之间处于张紧状态。可以连接初始加压到预定压力的蓄压器,以便向液压缸供应压力。当活塞杆被环形带中的张力波从液压缸中快速拉出时的阶段期间,液压缸与蓄压器之间的一个或多个节流阀可以显著增加液压缸中的压力。此外,止回阀可以允许从蓄压器到液压张紧缸的基本不受阻碍的流体流动。
 555
0
555
0
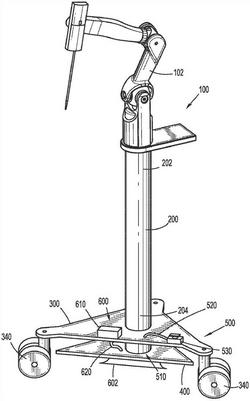
本文描述的一些实施方案涉及一种可操作以将机器人臂运输到手术台和/或从手术台运输机器人臂的臂推车。机器人臂可以经由连接器联接到臂推车。连接器可以可滑动地安装到臂推车,使得连接器和机器人臂可以相对于臂推车共同移动。例如,当臂推车邻近手术台时,连接器和机器人臂可以移动以提供最终的精细调整,以便将所器人臂与手术台的联接部分对准。
 736
0
736
0
一种外科手术机器人推车组合件包含:在其上支撑机器人臂的竖直柱、基部以及多个脚轮,所述多个脚轮附接到所述基部并且被适配成允许所述外科手术机器人组合件移动。所述外科手术机器人推车进一步包含在所述基部上的至少一个真空杯,所述至少一个真空杯用于将所述基部密封地接合到地板,从而固定所述外科手术机器人推车组合件。
 809
0
809
0
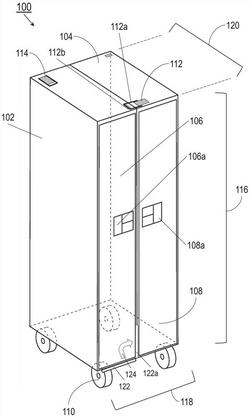
本发明涉及一种用于单通道飞机的可重构窄厨房推车。在实施例中,厨房推车包括铰接或可滑动地连接的两个相邻的(例如,左侧和右侧)部分。厨房推车具有与厨房结构的厨房推车托架兼容的默认构型。通过相对于右侧部分铰接左侧部分(例如,通过枢转或旋转左侧部分),厨房推车可以转变成狭窄构型。当处于狭窄构型时,厨房推车的长度可以是其两倍,但宽度可以是其一半,从而允许乘客通过过道通过而不必将厨房推车从过道中移回,也不会破坏座席餐饮服务。厨房推车包括辅助脚轮,辅助脚轮在过渡期间展开以帮助主脚轮使厨房推车在狭窄的构造中保持平衡和活动性。
 650
0
650
0
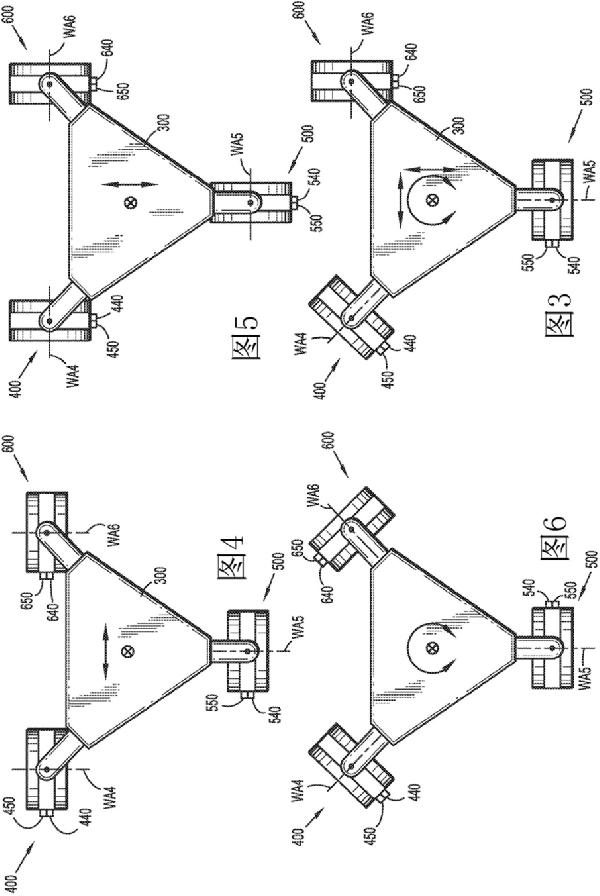
一种移动手术机器人推车组合件包含支撑其上机器人臂的竖直立柱、基座和多个脚轮,每个脚轮具有轮并且每个脚轮附接到所述基座,从而允许所述手术机器人组合件移动。所述多个脚轮中的每个脚轮具有轮对准组合件,轮对准组合件配置为将相应的轮中的每个锁定在多个方位上。
 1114
0
1114
0
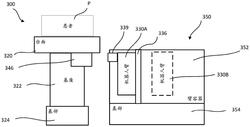
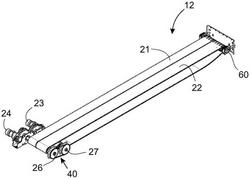
一种在空气喷杆式撒布机中用于分段控制的产品分配系统具有固体产品计量组件,该固体产品计量组件具有:第一环形输送机和第二环形输送机,用于将产品从容器输送到空气系统,第一和第二环形输送机基本上彼此平行,第一输送机独立于第二输送机被驱动;以及第一轴、第二轴和第三轴,第一轴与第二轴平行并与之分离且独立于第二轴被驱动,第二轴与第三轴平行并与之分离,第一轴驱动第一输送机,第二轴驱动第三轴以驱动第二输送机。
 1033
0
1033
0
在一些实施方案中,一种装置可以包括用于外科机器人臂的推车,所述外科机器人臂具有可释放地耦接到手术台上的耦接位点的耦接器。所述推车可以包括基部和第一接合特征。所述基部可以在远离所述手术台的第一位置与邻近所述手术台的第二位置之间在支撑表面上自由地移动。所述第一接合特征可以被配置用于与和所述手术台相关联的第二接合特征接合,使得当所述第一接合特征和所述第二接合特征被接合时,所述机器人臂的所述耦接器被设置在所述机器人臂的所述耦接器可以由所述手术台的所述耦接器接合的位置中。
 521
0
521
0
一种皮带输送机用皮带纠偏调节装置,采用连杆机构的槽形输送带,其特征在于,在输送带左、右二侧分别设置:二个独立的左、右侧托辊支架,左、右侧托辊支架分别设置左、右侧托辊及其上皮带;二个独立的左、右侧立辊,通过立辊分别,设计一组垂直和水平方向的丝杠,立辊设置调节手柄,通过调节手柄对左、右侧托辊调节在垂直和水平方向进行独立移动距离,由此,纠偏,将皮带扶正。从而有效控制跑偏出现,减少皮带机沿线的撒落料,确保环境整洁,达到文明生产的目的。
 457
0
457
0
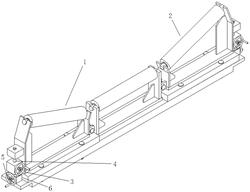
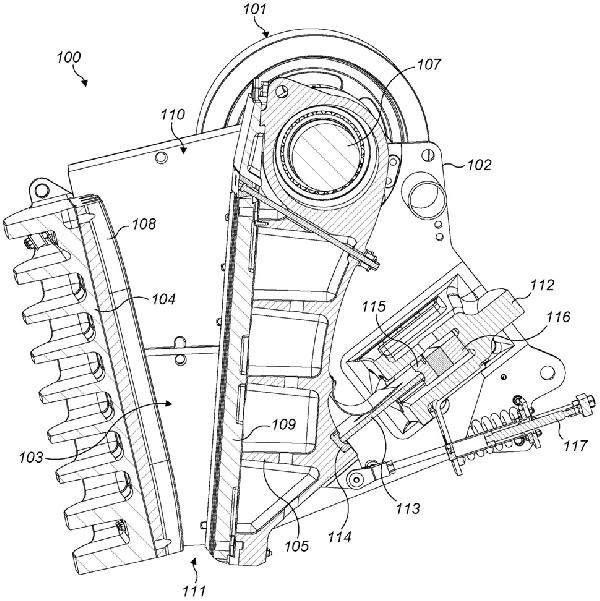
一种颚式破碎机,具有可移动颚支撑框架,该可移动颚支撑框架构造用以促进填隙片设置和楔子设置之间的互换。所述支撑框架特别地是被构造用以最小化应力集中,并且用以提供在楔子设置和填隙片设置之间的有时间效率的互换,而不需要对所述支撑框架的区域进行焊接、切割和加工。
 385
0
385
0
公开了用于控制辊式破碎机的启动顺序的系统和方法。辊式破碎机包括通过间隙分开的两个大致平行的辊,其中,辊沿相反方向旋转。在启动期间,辊之间的间隙大于正常生产期间的间隙,并且供给装置以低于正常生产供给速率的速度运行。辊以预定速度旋转,该预定速度低于正常生产期间的速度。系统的其他参数被设定为,使得材料在辊的整个长度上被供给,并且在启动期间不施加破碎力。本公开的方法和系统减少了辊式破碎机的辊、框架和液压系统上的应力量。
 462
0
462
0
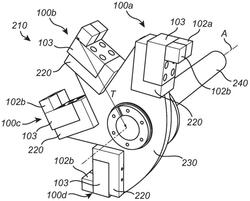
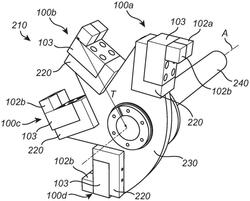
一种辊式破碎机及其操作方法,其中用于辊式破碎机的刮刀设备,包括能旋转多头刮刀单元,该多头刮刀单元具有至少两个刮刀,该至少两个刮刀围绕能旋转多头刮刀单元被切向地布置在距能旋转多头刮刀单元的旋转轴线相应的径向距离处。刮刀设备还包括旋转致动器,该旋转致动器被布置成使能旋转多头刮刀单元选择性地旋转,以允许每次操作使用至少两个刮刀中的一个刮刀。刮刀设备还包括至少一个制动装置,该制动装置被构造成在至少两个刮刀中的一个刮刀的操作期间阻止和/或限制能旋转多头刮刀单元的旋转。还提供了一种包括刮刀设备的辊式破碎机和一种用于操作辊式破碎机的方法。
 1168
0
1168
0
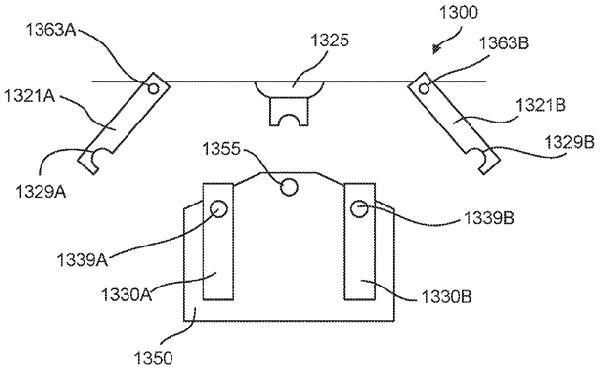
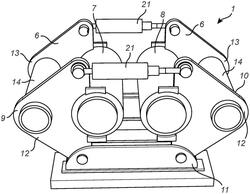
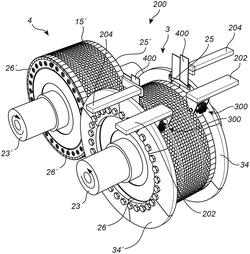
本公开涉及一种辊式破碎机,所述辊式破碎机包括第一研磨辊和第二研磨辊,第一研磨辊和第二研磨辊大致彼此平行布置并在两者之间限定破碎间隙,并且能以反向旋转的方式驱动。辊式破碎机包括用于使存在于辊的至少一个的破碎表面上的粒状材料松散的第一类型的装置,该装置包括至少一个可旋转盘元件。本公开还涉及一种辊式破碎机,其中,多个盘元件可单独地旋转。本公开还涉及一种用于辊式破碎机的改装套件。
 1161
0
1161
0
一种用于辊式破碎机的刮刀设备,包括能旋转多头刮刀单元,该多头刮刀单元具有至少两个刮刀,该至少两个刮刀围绕能旋转多头刮刀单元被切向地布置在距能旋转多头刮刀单元的旋转轴线相应的径向距离处。刮刀设备还包括旋转致动器,该旋转致动器被布置成使能旋转多头刮刀单元选择性地旋转,以允许每次操作使用至少两个刮刀中的一个刮刀。刮刀设备还包括至少一个制动装置,该制动装置能够在至少两个刮刀中的一个刮刀的操作期间阻止和/或限制能旋转多头刮刀单元的旋转。还提供了一种包括刮刀设备的辊式破碎机。
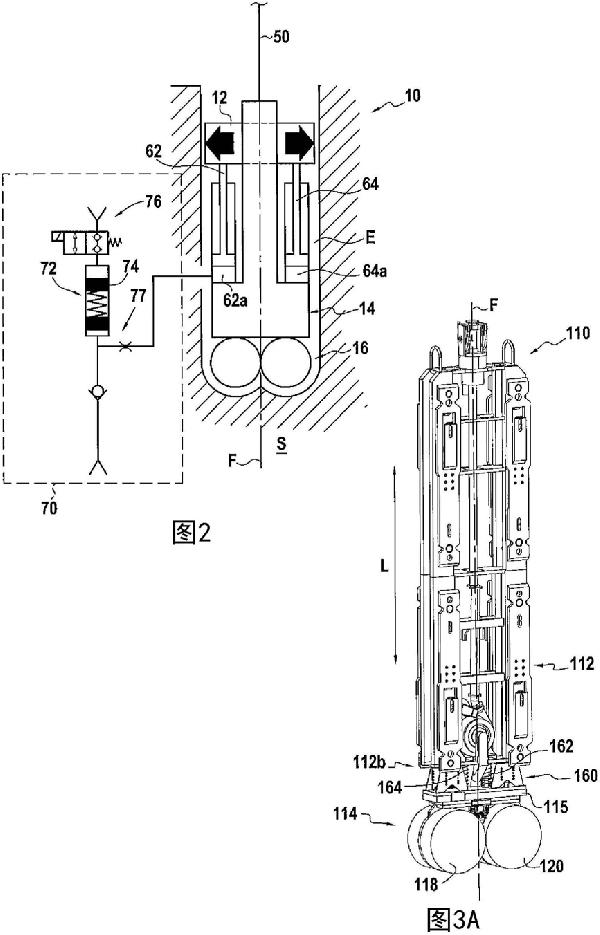
一种用于辊式破碎机的液压系统及用于粉碎材料的辊式破碎机,液压系统包括能连接至辊式破碎机的第一可移动支承壳体的第一主缸、能连接至辊式破碎机的第二可移动支承壳体的第二主缸、能连接至辊式破碎机的第一可移动支承壳体的第一交叉缸、以及能连接至辊式破碎机的第二可移动支承壳体的第二交叉缸。第一交叉缸的第一压缩室与第二交叉缸的第二回弹室流体连接,以及第一交叉缸的第一回弹室与第二交叉缸的第二压缩室流体连接。
 961
0
961
0
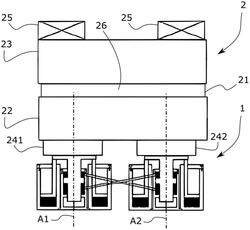
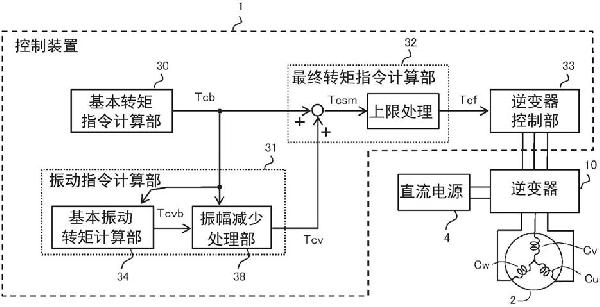
本发明提供一种能够使旋转电机输出的振动转矩分量不被旋转电机的最大输出转矩限制上限的旋转电机的控制装置。旋转电机(2)的控制装置(1)使振动转矩指令值(Tcv)的振幅减少,以使得基本转矩指令值(Tcb)与振动转矩指令值(Tcv)的振幅相加后得到的振动最大值变为上限指令值(Tcmx)以下,并利用上限指令值(Tcmx)对基本转矩指令值(Tcb)与振动转矩指令值(Tcv)相加后得到的加法转矩指令值(Tcsm)进行上限限制,将由此计算得到的值作为最终转矩指令值(Tcf)。
北方有色为您提供最新的其他有色金属矿山技术理论与应用信息,涵盖发明专利、权利要求、说明书、技术领域、背景技术、实用新型内容及具体实施方式等有色技术内容。打造最具专业性的有色金属技术理论与应用平台!

 2026年03月20日 ~ 22日
2026年03月20日 ~ 22日  2026年03月20日 ~ 22日
2026年03月20日 ~ 22日  2026年03月25日 ~ 27日
2026年03月25日 ~ 27日  2026年03月26日 ~ 28日
2026年03月26日 ~ 28日  2026年03月27日 ~ 29日
2026年03月27日 ~ 29日 





































































