全部
▼
热搜:

 1280
1280
 0
0
摘 要: 随着我国社会发展,对矿产资源的需求量也与日俱增,传统的采矿技术在作业过程中会造成资源浪费、环境污染等问题,可持续发展理念对传统的采矿技术进行了否定。填充采矿技术作为现代采矿理念中较为绿色的矿产资源开发技术,具有众多开采技术所不具备的优点。本文笔者通过对采矿技术的学习和研究,阐述了传统采矿技术的
 1292
0
1292
0
摘 要:传统的采矿理念的作用下采矿业对自然环境的破坏作用极其明显,资源浪费的现象也极其普遍,而在现代采矿理念下催生出的充填采矿技术,弥补了传统采矿所具有的缺陷,对于改善自然环境,提高资源的利用率具有极其重要的作用。文章详细的分析了传统矿产资源开采中存在的问题,提出了现代采矿理念绿色采矿,及其具体的技术
 1300
0
1300
0
摘 要:在矿产资源大规模开发的前提下,采用传统采矿模式会在开发过程中排出大量固体废料,如尾砂、冶炼渣、废石块等,这些固体废料的排放会造成严重的环境破坏,甚至会引发各类事故。大规模开发矿产资源,排放的大量工业废料、废水、废气使环境污染严重,为此,加强矿山环保及矿山资源综合利用的重要性和紧迫性受到人们越来
 1020
0
1020
0
摘要:随着我国经济的快速发展,能源问题成为人们关注的重点,尤其是煤矿资源的开采,井下采矿技术不断的革新,新技术、新工艺、新设备在井下采矿总被广泛的应用,有效的提高井下采矿质量、生产效率、安全性能及经济效益。本文对我国矿产资源发展情况及井下采矿技术进行分析,以促进我国采矿事业健康可持续发展。关键词:采矿
 729
0
729
0
摘 要:随着露天采矿技术的不断发展,露天矿的开采活动也逐渐向“精细化、精准化的方向演进,尤其对于矿体结构复杂、选采要求高、爆破受到外部制约的露天矿而言,选用一种能够实现损失贫化率低、资源回收率高、产生的环境污染小的免爆破高效开采工艺是很有必要的。在这样的背景下,露天采矿技术与设备便在众多露天矿得到了
 778
0
778
0
[摘 要]矿产作为工业民生发展的基础资源,是国家工业发展潜力的体现,在我国传统的采矿工作中,尾砂、废石等矿产废料的排放量占矿产资源开发总产量的85%,这意味着我国矿产资源的开发与利用存在着严重的问题。因此,我国当前的矿产资源的开采必须应用到现代化的采矿理念和采矿方法,以此来减少矿产废料的排放量,降低或避免矿
 1247
0
1247
0
摘 要:在高速发展的现代工业阶段,逐渐扩大了采矿规模。传统采矿理念已经严重破坏了环境,因此迫切需要研究现代采矿理念和充填采矿。本文主要分析了我国传统采矿理念存在的问题,现代采矿理念概述,绿色采矿理念下的充填采矿技术。关键词:采矿理念;充填;现代中图分类号:TD853 文献标识码:A我国在发展矿产行业过程中,充
 991
0
991
0
摘要:随着科技水平的不断提高,现代工业也处于快速发展的过程中,矿产资源的开发与利用规模也在不断加大。但在开采矿产资源的过程中,开采的对象都是一些比较难采的矿体,经常会遇到深部岩石爆裂、地表坍塌、冲击地压等状况。而且矿业在不断的开发中,环境也面临着重大的考验,大量的工业废气、废水为环境带来了恶劣的影响,
 1202
0
1202
0
摘要:矿产资源在自然资源中占有着非常重要的位置的,对国家的经济发展和人们的日常生活都有着直接的影响。使用传统开采模式进行采矿的过程中,会对自然环境产生严重的影响,矿产区域的环境会受到污染,而且还会影响生态环境的平衡,导致自然灾害频发,给人们的生命财产安全造成威胁。将可持续发展理融入到开采工作中,并使用
 1105
0
1105
0
[摘 要]近年来我国矿业得到迅速发展,矿山的生产规模、技术及设备方面都有了很大的改变。由于经济发展的需要,矿产资源的开采力度越来越大,矿产资源的经济价值也有了较大提高,使得品位较低、矿体条件较为复杂的矿体也成为了开采对象。为了有效提升难采矿体的开采效率,下文结合实例,对金矿难采矿体开采方法进行了研究,以
 1105
0
1105
0
摘要:为了提高矿石堆浸浸出的效率,本文主要对浸堆的构筑、矿石性质、布液的方式以及溶浸液等多种因素进行了综合性分析,并充分结合了有关实施工艺,探讨了主要的解决方法,并为在微生物作用下提高矿石堆堆浸浸出效率提供了明确的发展方向。关键词:矿石堆浸;浸出率;影响因素前言溶浸采矿目前主要可以分为堆浸法、地浸法以
 1320
0
1320
0
摘 要:本文以低品位氧化金矿石的堆浸为例,介绍堆浸作业一般工艺,分析了堆浸作业可能造成的环境污染和生态破坏,提出相应的污染防治措施。关键词:堆浸;环境影响; 污染防治一、堆浸技术应用前景我国金矿资源中,低品位氧化矿石量(矿石含金品位1-3g/t)占有一定的比例,处理这类矿石采用常规氰化法提金工艺经济上不合算,而
 842
0
842
0
摘要:某金铜氧化矿石铜品位0.88 %,金品位1.76 g/t,矿石氧化率为87.50 %。金矿物主要为自然金、银金矿,铜矿物以氧化铜矿物为主。针对矿石性质,进行了堆浸浸铜、氰化浸金试验研究,考察了堆浸粒度、硫酸用量等堆浸条件及磨矿细度、氢氧化钠用量等氰化浸金条件对回收指标的影响。结果表明:在最佳条件下,采用硫酸法堆浸浸
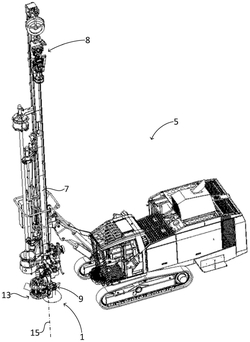
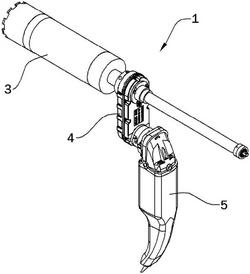
本发明涉及一种用于构造成用于竖向钻凿的钻机(5)中的钻头(3)的至少半自动更换的钻头更换系统(1)。钻机(5)包括可互换的多个钻管(7),其中,钻头(3)设置在端部钻管的端部部段处。钻头(3)借助于螺纹连接部附接至端部部段,并且扭矩借助于花键联接部提供给钻头(3)。钻机(5)还包括下部支撑装置(9)和断开器装置(11)。系统(1)还包括设置成保持多个钻头(3)的钻头存放装置(13)以及包括夹持器件(23)的夹持臂(21),夹持器件构造成用于选择性地夹持钻头(3)。夹持臂(21)还可以包括设置成监测夹持臂(21)的运动的运动传感器,并且系统(1)还可以包括控制单元。控制单元设置成接收来自传感器和钻机(5)的输入并且控制夹持臂(21)、夹持器件(23)、钻头存放装置(13)以及钻机(5)的断开器(11)的运动。本发明还涉及包括这种系统(1)的这种钻机(5)、用于对这种钻机(5)中的钻头(3)进行更换的方法。本发明还涉及一种软件,当该软件存储在这种系统(1)的控制单元中并且被执行时,该软件实行该方法。
 483
0
483
0
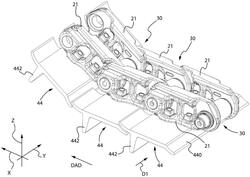
一种根据本发明的重载车辆(2)包括:A)履带传动装置(1、1'),车辆的其余部分能够在履带传动装置(1、1')上滚动以便移动;B)至少一个传感器(100、100'、100"、100III),其配置为检测重载车辆(2)的履带传动装置(1)本身或所包含的环境的物理量或者履带传动装置(1)或重载车辆的周围的物理量;C)电源供应单元(102),其配置为向传感器供应电力。电源供应单元(102)包括整流天线(1020),整流天线(1020)配置为从外部电磁源(104)接收电磁功率并且向传感器(100、100'、100"、100III)供应电磁功率的至少一部分。本发明还涉及履带传动装置、履带板、履带链节、用于这种车辆的底盘总成。
 1010
0
1010
0
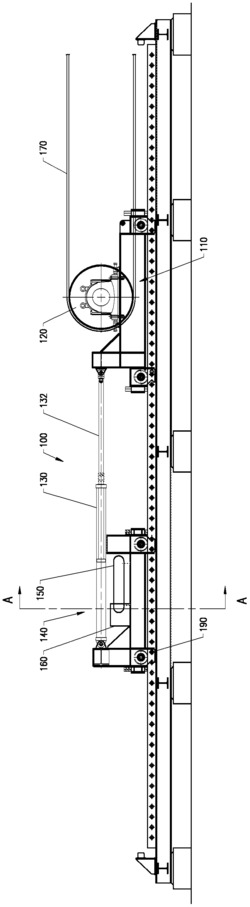
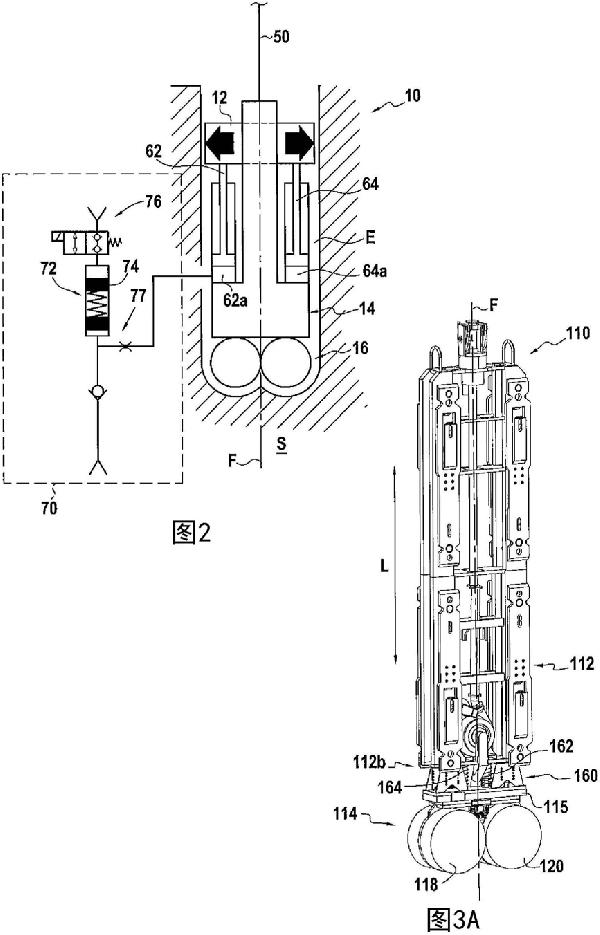
一种张紧系统,其将传送机的环形带的张力保持在目标范围内。张紧系统可以包括可移动托架,该可移动托架支撑向传送带提供张力的卷取滑轮。张紧系统还可包括支撑在可重新定位的推车上的各种液压部件。一个示例性液压部件是液压缸,该液压缸在可移动托架与可重新定位的推车之间处于张紧状态。可以连接初始加压到预定压力的蓄压器,以便向液压缸供应压力。当活塞杆被环形带中的张力波从液压缸中快速拉出时的阶段期间,液压缸与蓄压器之间的一个或多个节流阀可以显著增加液压缸中的压力。此外,止回阀可以允许从蓄压器到液压张紧缸的基本不受阻碍的流体流动。
 542
0
542
0
本文描述的一些实施方案涉及一种可操作以将机器人臂运输到手术台和/或从手术台运输机器人臂的臂推车。机器人臂可以经由连接器联接到臂推车。连接器可以可滑动地安装到臂推车,使得连接器和机器人臂可以相对于臂推车共同移动。例如,当臂推车邻近手术台时,连接器和机器人臂可以移动以提供最终的精细调整,以便将所器人臂与手术台的联接部分对准。
 719
0
719
0
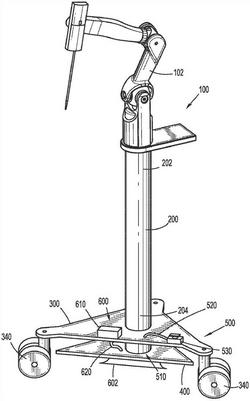
一种外科手术机器人推车组合件包含:在其上支撑机器人臂的竖直柱、基部以及多个脚轮,所述多个脚轮附接到所述基部并且被适配成允许所述外科手术机器人组合件移动。所述外科手术机器人推车进一步包含在所述基部上的至少一个真空杯,所述至少一个真空杯用于将所述基部密封地接合到地板,从而固定所述外科手术机器人推车组合件。
 799
0
799
0
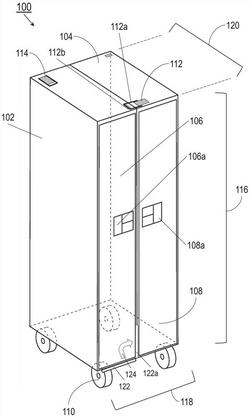
本发明涉及一种用于单通道飞机的可重构窄厨房推车。在实施例中,厨房推车包括铰接或可滑动地连接的两个相邻的(例如,左侧和右侧)部分。厨房推车具有与厨房结构的厨房推车托架兼容的默认构型。通过相对于右侧部分铰接左侧部分(例如,通过枢转或旋转左侧部分),厨房推车可以转变成狭窄构型。当处于狭窄构型时,厨房推车的长度可以是其两倍,但宽度可以是其一半,从而允许乘客通过过道通过而不必将厨房推车从过道中移回,也不会破坏座席餐饮服务。厨房推车包括辅助脚轮,辅助脚轮在过渡期间展开以帮助主脚轮使厨房推车在狭窄的构造中保持平衡和活动性。
 632
0
632
0
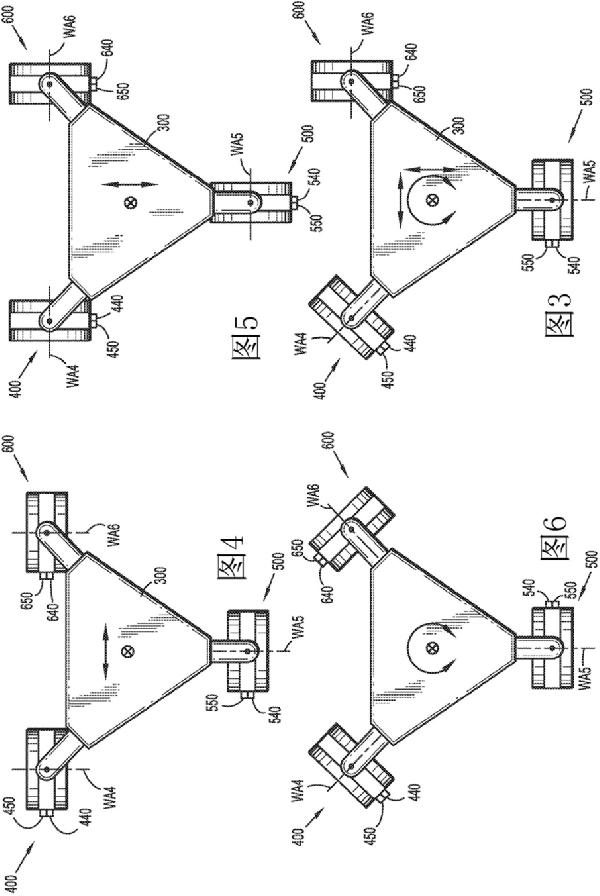
一种移动手术机器人推车组合件包含支撑其上机器人臂的竖直立柱、基座和多个脚轮,每个脚轮具有轮并且每个脚轮附接到所述基座,从而允许所述手术机器人组合件移动。所述多个脚轮中的每个脚轮具有轮对准组合件,轮对准组合件配置为将相应的轮中的每个锁定在多个方位上。
 1019
0
1019
0
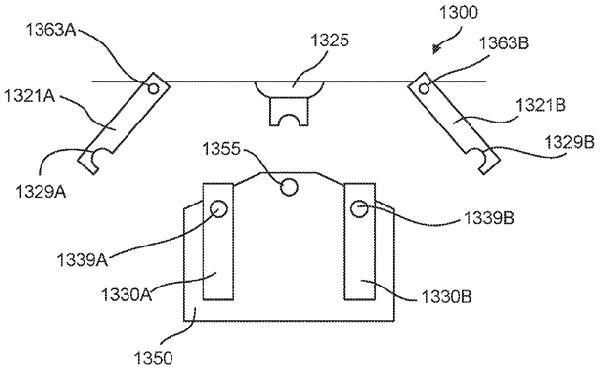
在一些实施方案中,一种装置可以包括用于外科机器人臂的推车,所述外科机器人臂具有可释放地耦接到手术台上的耦接位点的耦接器。所述推车可以包括基部和第一接合特征。所述基部可以在远离所述手术台的第一位置与邻近所述手术台的第二位置之间在支撑表面上自由地移动。所述第一接合特征可以被配置用于与和所述手术台相关联的第二接合特征接合,使得当所述第一接合特征和所述第二接合特征被接合时,所述机器人臂的所述耦接器被设置在所述机器人臂的所述耦接器可以由所述手术台的所述耦接器接合的位置中。
 934
0
934
0
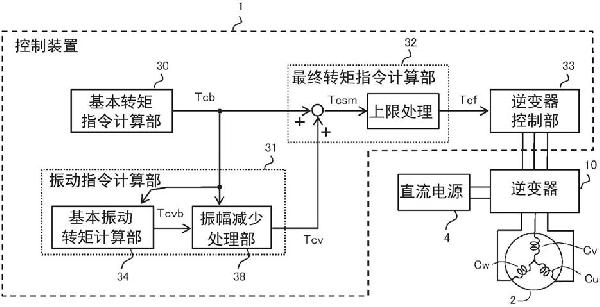
本发明提供一种能够使旋转电机输出的振动转矩分量不被旋转电机的最大输出转矩限制上限的旋转电机的控制装置。旋转电机(2)的控制装置(1)使振动转矩指令值(Tcv)的振幅减少,以使得基本转矩指令值(Tcb)与振动转矩指令值(Tcv)的振幅相加后得到的振动最大值变为上限指令值(Tcmx)以下,并利用上限指令值(Tcmx)对基本转矩指令值(Tcb)与振动转矩指令值(Tcv)相加后得到的加法转矩指令值(Tcsm)进行上限限制,将由此计算得到的值作为最终转矩指令值(Tcf)。
 927
0
927
0
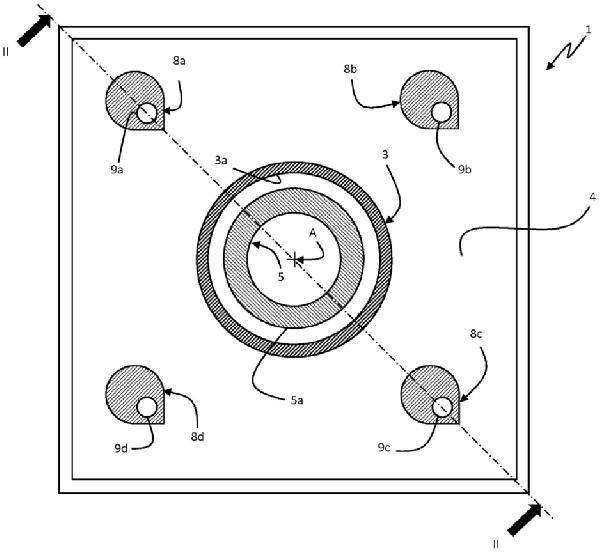
一种破碎机(1),包括:机架(2)、槽(3)、位于所述槽(3)内的锥体(5),所述破碎机(1)进一步包括用于相对于机架(2)振动槽(3)的振动装置(7);所述破碎机(1)的特征在于用于振动槽(3)的振动装置(7)包括安装在底架(4)上的至少两个振动器(8a,8b,8c,8d),每个振动器(8a,8b,8c,8d)都通过电机(10)围绕底架的纵向轴线旋转,每个电机(10)彼此独立地驱动与之相关联的振动器。
 920
0
920
0
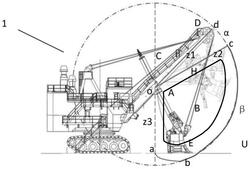
本发明涉及用于矿山机械直流电铲的铲斗的控制方法和控制系统,方法包括:电机编码器检测铲斗当前运行位置并将其发送给电机控制器,驾驶员对铲斗的驱动指令被传输给电机控制器,电机控制器判断铲斗当前运行位置是否位于正常作业区域中,正常作业区域为铲斗在运行期间不会与矿山机械直流电铲的其余部件发生碰撞的区域,并且为以推压杆的长度为半径,从推压杆竖直向下开始经过其在地面下挖路径直至其零部件恰好要碰触到悬臂或卷轮时铲斗所在的部位处经过的扇形区域,当电机控制器判断铲斗当前运行位置位于正常作业区域中时根据驱动指令致动推压杆和提升缆绳执行驱动指令的动作。通过该控制方法和控制系统能有效地因铲斗过度移动带来的部件损坏。
 609
0
609
0
本发明涉及一种对无人矿用卡车的装载位置进行定位的方法,包括:将针对为包括行驶部分和操作部分的装载装置建立的目标模型存储在处理器上,操作部分能围绕一竖轴线相对于行驶部分转动;在装载前,检测操作部分的位置和定向并确定其相对于行驶部分的当前角度,将其作为第一信号发送给处理器;操作员输入进入矿场的指令以及期望的装载角度并将其作为第二信号发送给处理器;处理器基于接收到的第一信号和第二信号以及所述目标模型的参数计算出所需要的装载位置,并控制无人矿用卡车自动行驶到所述装载位置。由此能精确地确定无人矿用卡车相对于电铲的装载位置,并提高装载效率。
 252
0
252
0
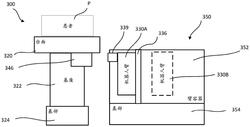
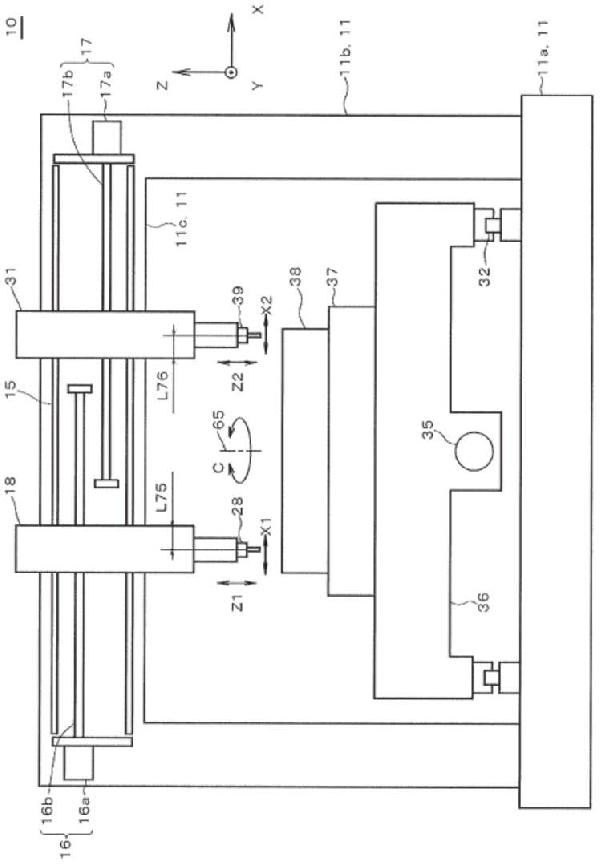
本发明提供一种在较短的加工时间内对在一个方向上无规律配置的孔进行加工的方法。针对设置于加工工作台的具有多个加工对象孔的对象物,生成由第1主轴进行加工的第1孔、以及由与第1主轴在第1方向上并列配置的第2主轴进行加工的第2孔的加工顺序,使加工工作台旋转,以使得第1孔和第2孔在第1方向上并列并且第1孔位于第1主轴侧,使第1主轴及第2主轴相对于加工工作台相对地移动,以使得第1孔与第1主轴的中心、以及第2孔与第2主轴的中心分别一致,第1主轴对第1孔进行加工,第2主轴对第2孔进行加工。
 1263
0
1263
0
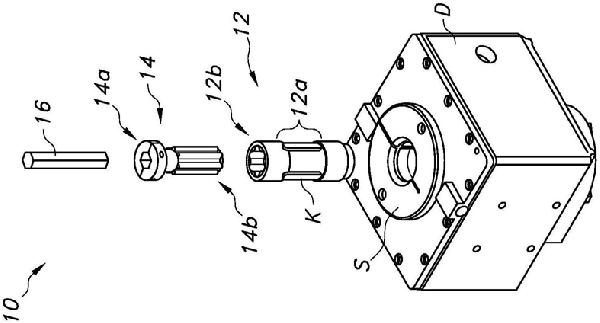
提供了一种用于将不同的第一钻具和第二钻具固定到钻头的系统,该钻头包括套座。该系统包括卡盘,该卡盘适于至少部分地定位在钻头的套座内,该卡盘包括用于接收第一钻具的第一开口。适配器被构造为用于在卡盘的第一开口内形成选择性锁定接合,该适配器包括用于接收第二钻具的第二开口。所述选择性锁定接合可以包括“扭转锁定”接合,并且该适配器可以布置成用于接收顶板锚杆。还公开了相关的方法。
 760
0
760
0
本发明涉及一种具有取芯钻头的一键锁定功能的取芯钻机,尤其,涉及在组装取芯钻头和减速器单元时自动维持锁定并能够轻松解除锁定的新概念技术。以往公开的取芯钻机存在因没有单独的锁定功能而在组装取芯钻头和减速器单元的状态下会产生取芯钻头或减速器单元在作业过程中出现移动或隔开的问题。本发明为用于消除这种问题的方案,本发明的特征在于谋求如下的技术,即,在通过对弹性设置于在主轴的外侧扣入设置而成的锁定外罩的锁定销进行按压来解除锁定的状态下,若在将与取芯钻头相结合的减速器连接器插入到在上述主轴所形成的连接孔之后放开锁定销,则可自动维持锁定。
 794
0
794
0
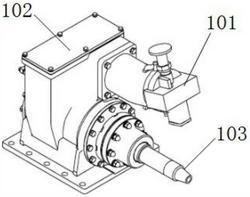
本实用新型属于机械设计领域,涉及一种具有可浮动钻杆接头的钻机动力头。包括依次配合连通的驱动马达,变速箱以及动力头主轴;该动力头主轴上安装有连接钻杆用的可浮动钻杆接头。本实用新型具有轴向浮动功能,将接头体与前端钻杆螺纹间的刚性挤压、摩擦变成了弹性渐变的过程,有效地保护了接头体的螺纹,延长其使用寿命;通过设置连接套,将长期产生冲击的动连接转移到了接头体和连接套之间,而主轴与连接套之间为没有冲击的销连接,大幅减小了主轴直接损坏的概率,有助于降低维修成本,缩短维修时间。
中冶有色为您提供最新的其他有色金属采矿技术理论与应用信息,涵盖发明专利、权利要求、说明书、技术领域、背景技术、实用新型内容及具体实施方式等有色技术内容。打造最具专业性的有色金属技术理论与应用平台!


 2025年10月17日 ~ 19日
2025年10月17日 ~ 19日  2025年10月23日 ~ 25日
2025年10月23日 ~ 25日  2025年10月31日 ~ 11月02日
2025年10月31日 ~ 11月02日  2025年11月07日 ~ 09日
2025年11月07日 ~ 09日  2025年11月14日 ~ 16日
2025年11月14日 ~ 16日 








































































有限责任公司")





