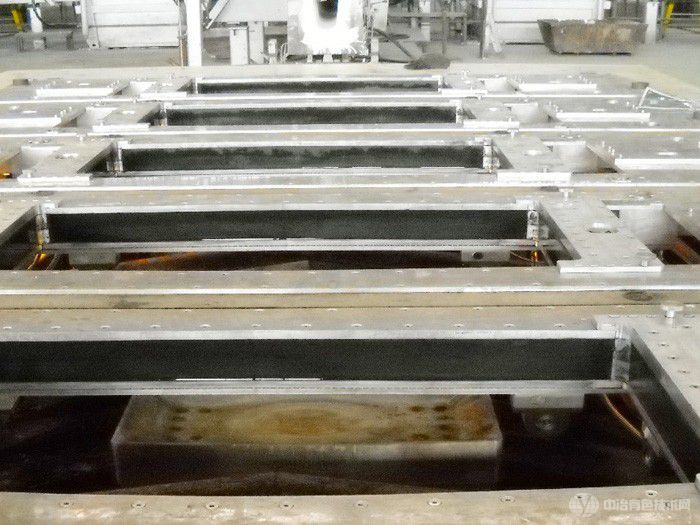
权利要求书: 1.一种铝合金模板定位机构,包括传送带(1),所述传送带(1)的上端放置有工件(3),所述传送带(1)的两端分别设置有安装箱(2),两个所述安装箱(2)内部对应工件(3)位置安装有钻孔机(4),两个所述安装箱(2)内部均安装有电动收缩杆(5),两个所述电动收缩杆(5)的上端分别安装有连接杆(6),两个所述连接杆(6)之间安装有多组安装杆(7),其特征在于,每个所述安装杆(7)的外壁均安装有两组定位装置(8);
所述定位装置(8)包括安装壳(801),所述安装壳(801)的下端设置有按压块(802),所述按压块(802)的两端分别固定安装有滑块(803),所述安装壳(801)的内部固定安装有配合滑块(803)使用的导向杆(805),所述滑块(803)的上端设置有复位弹簧(804),其中一个所述滑块(803)的外壁固定设置有第一楔形块(806),所述第一楔形块(806)的倾斜面外壁滑动设置有第二楔形块(807),所述第二楔形块(807)与安装壳(801)之间设置有压缩弹簧(809),所述第二楔形块(807)外壁固定设置有连接轴(808),所述连接轴(808)远离第二楔形块(807)的一端安装有防滑橡胶块(810)。
2.根据权利要求1的一种铝合金模板定位机构,其特征在于,所述安装壳(801)下端外壁粘贴有防滑垫(811)。
3.根据权利要求2的一种铝合金模板定位机构,其特征在于,所述定位装置(8)上端与安装杆(7)之间为滑动连接,定位装置(8)与安装杆(7)之间通过螺栓锁定,安装杆(7)为矩形杆。
4.根据权利要求1的一种铝合金模板定位机构,其特征在于,所述按压块(802)的下端设置有滚珠。
5.根据权利要求1的一种铝合金模板定位机构,其特征在于,所述安装杆(7)外壁设置有刻度线。
说明书: 一种铝合金模板定位机构技术领域[0001] 本实用新型涉及定位机构的技术领域,尤其涉及一种铝合金模板定位机构。背景技术[0002] 铝合金模板全称为混凝土工程铝合金模板,是继胶合板模板、组合钢模板体系、钢框木(竹)胶合板体系、大模板体系、早拆模板体系后新一代模板系统。
[0003] 有技术中铝合金模板的钻孔切割往往使用传送带运输,而通过传送带运输过来的工件在运输过程中有
声明:
“铝合金模板定位机构” 该技术专利(论文)所有权利归属于技术(论文)所有人。仅供学习研究,如用于商业用途,请联系该技术所有人。
我是此专利(论文)的发明人(作者)
 919
编辑:北方有色网
来源:山东标正建筑科技有限公司
919
编辑:北方有色网
来源:山东标正建筑科技有限公司



 咨询细节
咨询细节





































































 2026年03月20日 ~ 22日
2026年03月20日 ~ 22日 





