全部
▼
热搜:
 1267
1267
 0
0
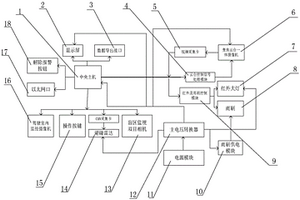
一种列车防撞预警装置,涉及列车防护领域。为解决现有技术在地面信号系统均处于关闭或者失效状态,不能起到监控列车作用,对于具有突发性、不可预测等非合作目标侵限事件的发生不能提前预警的问题。中央主机的报警信号输出端与解除报警按钮连接,避碰雷达与中央主机连接,驾驶室内监控摄像机、操作按键和盲区双目相机通过与中央主机连接,云台控制信号处理模块和红外及雨刷控制模块的数据接口分别与中央主机的二号数据接口连接,红外及雨刷控制模块用于控制红外大灯和雨刷,中央主机通过数据接口将云台指向及变焦控制信号传递给变焦云台一体摄像机的控制信号输入端。本实用新型适用于列车防撞预警领域。
 1463
0
1463
0
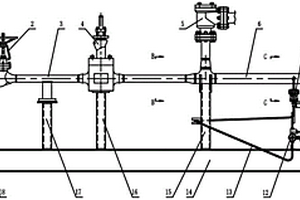
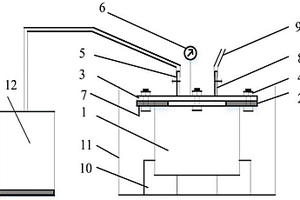
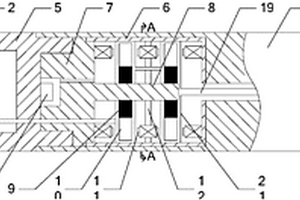
一种用于蒸汽吹灰器的高温高压蒸汽减压装置属于锅炉吹灰器技术领域:该高温高压蒸汽减压装置主要由截止阀、减压阀、弹起式安全阀、压力变送器和高温高压蒸汽装置底座等组成,蒸汽进气管连接来自锅炉锅筒内的高压蒸汽,截止阀控制高压蒸汽流入与关闭,减压阀对高压蒸汽进行减压,在减压阀失效的情况下,弹起式安全阀可以实现高压蒸汽的放空、泄压,压力变送器和压力表监测减压后的蒸汽是否满足蒸汽吹灰器的使用压力,进而供给各个蒸汽吹灰器进行吹灰操作,此装置实现了高温高压蒸汽的有效减压效果,是一套完备的减压装置。同时,该高温高压蒸汽减压装置具有结构合理、安全可靠的特点。
 1321
0
1321
0
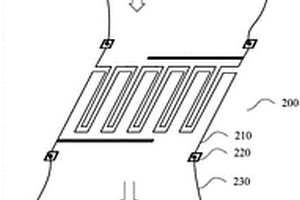
一种双余度铂薄膜热敏电阻器,属于热敏电阻器技术领域。本实用新型针对现有铂薄膜热敏电阻器存在失效问题并易受外界电磁场干扰的问题。包括:双余度感温层设置在陶瓷基片上,防护层覆盖于双余度感温层的上表面,并对陶瓷基片全覆盖;双余度感温层包括两根感温铂薄膜金属线、四个引线焊盘和四根引线,四个引线焊盘与陶瓷基片的四角对应设置,相邻的一对引线焊盘之间连接一根感温铂薄膜金属线,另外一对相邻的引线焊盘之间连接另一根感温铂薄膜金属线;两根感温铂薄膜金属线的排布形式相对应;引线焊盘的表面设置有铂浆料涂层,每个引线焊盘经铂浆料涂层连接一根引线。本实用新型可应用于航空航天等高可靠、高精度温度测控中。
 1177
0
1177
0
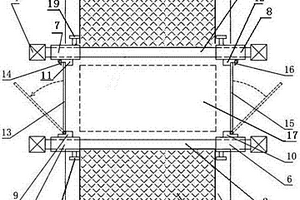
本装置的兽医专用治疗护笼采用两个外开门和围栏的设计,可通过食物引诱或其他引诱方式使单只动物引进到该护笼中,关上左右外开门,地秤自动测量动物个体的体重,左右外开门可通过滑套的作用来调整距离。在围栏的两侧分别设置有工作台,能够满足多人参与的大型动物的治疗。工作台内设置有多个抽屉,其中器械箱方便存放手术器械,药品箱能够方便药品的存取,并且还设置了一个有制冷装置的低温药品箱,为药品提供低温的保护环境,避免一些需要低温保存的药品在手术的过程中失效。通过操作口能够将动物所需医治的四肢放置到手术台上,方便对动物进行手术和诊治。
 1529
0
1529
0
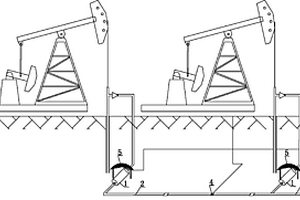
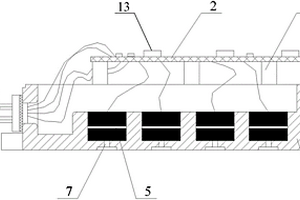
本实用新型涉及一种油田井口地下加热及可更换伴热集输系统,包括在每一井口地下设置的埋地电加热器、可更换式伴热带保温管连接组成的站间输送管道及电控箱、测温元件,所述埋地电加热器内设置有螺旋输送结构,所述可更换伴热带保温管的伴热带可从伴行管的一端穿入,从另一端穿出。本申请通过将井口加热器埋入地下,有效解决了井口作业时,电缆线易断裂、失窃失盗等问题;另外站间输送管道采用可更换伴热带保温管,解决了由于伴热线接头连接质量不过关,超温起火、伴热失效等问题;该系统控制技术先进、合理、可靠,施工安装快捷,维修方便,运行费用省。
 1341
0
1341
0
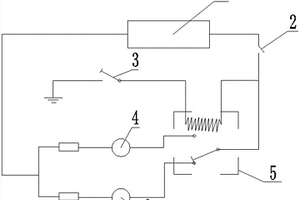
一种新型的发动机油压开关可靠性考核装置,属于发动机试验技术领域。本实用新型的一种新型的发动机油压开关可靠性考核装置,包括:12V电源、点火开关、油压开关、绿色指示灯、继电器和红色指示灯,所述的12V电源、点火开关和继电器依次串联,继电器的上触点、绿色指示灯和12V电源依次串联,继电器的下触点、红色指示灯和12V电源依次串联,所述的油压开关一端电连接继电器,另一端接地。本实用新型涉及一种新型的发动机油压开关可靠性考核装置,可在发动机台架上实时反映油压开关的功能特性是否失效。同时以指示灯形式告知操作者,而不必待装入成车之中再进行测试,提升了工作效率,省却了很多麻烦,且结构简单,使用方便。
 1098
0
1098
0
高可靠多余度压差传感器,属于传感器领域,本实用新型为解决现有压差传感器因偶发性传感器输出超差、异常甚至无输出等失效现象,导致影响压力参数测量的问题。本实用新型包括基座、电路板、电连接器和多个支柱,基座的端部设置有电连接器,基座的上方设置有电路板,并通过多个支柱支撑;还包括n个第一、第二油路压力敏感芯体、n个第一、第二油路引入管路和温度传感器,基座内部设置有n个第一、第二油路压力敏感芯体;每个压力敏感芯体均通过一个管路与外界连通;每个压力敏感芯体的电信号输出端均与电路板进行电连接,电路板的n路差压信号通过电连接器输出;温度传感器设置在电路板上。
 926
0
926
0
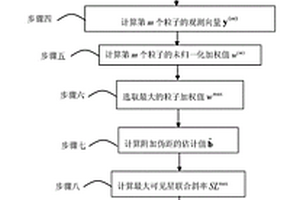
一种基于粒子滤波的改进型RAIM抗欺骗式干扰方法,本发明涉及改进型RAIM抗欺骗式干扰方法。本发明是要解决针对单颗卫星的测量失效,控制解算流程误导接收机定位以及RAIM忽略了残余矢量之间的相关性和相似性的问题,而提出的一种基于粒子滤波的改进型RAIM抗欺骗式干扰方法。该方法是通过1、组成2、得到ρn,和卫星的三维坐标;3、计算4、计算y(m);5、计算w(m);6、选取wmax;7计算8、计算最大可见星SLmax;9、计算判决门限γ;10、判断存在欺骗卫星;11、估计干扰卫星的序号;12、若欺骗卫星标志F=1,去掉干扰,进行定位解算,若F≠1进行定位解算等步骤实现的。本发明应用于改进型RAIM抗欺骗式干扰领域。
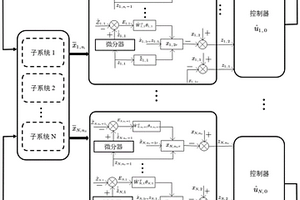
本发明公开一种基于互联大规模系统的最优容错控制方法,本发明研究了一种大规模互联系统。其中每个子系统的模型是严格反馈的形式,系统的状态是可测的,并且系统中的控制输入增益函数是已知的。各个系统之间的互联项是未知的,部分模型动态也是未知的。考虑执行器故障,并对系统中常出现的几种故障,例如失效故障和卡死故障进行建模。其次,利用反步技术设计每个状态的参考信号。最后,利用自适应动态规划技术和改进的神经网络技术设计出关于含有故障的大规模互联系统的最优容错控制方案。
 932
0
932
0
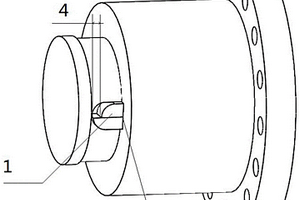
本发明公开一种大型汽轮发电机转子联轴器装配工艺方法,通过对楔形键配加工位置进行创新,以避免多次刨床配加工、减少加工带有斜面键造成的装夹误差;通过增加研配余量,以减少测量误差和加工误差,从而避免楔形键紧程失效的发生。
 1149
0
1149
0
本发明涉及一种微通道换热核心的水压试验方法,属于微通道换热核心水压测试技术领域。本发明提供一种安全可靠的微通道换热核心的水压试验方法,降低微通道换热核心的潜在试验风险,同时避免微通道换热核心失效所带来的不必要的经济损失。本发明通过将微通道换热器核心置入一个有明确耐压能力的高压容器内,并通过氩弧焊用薄板封闭微通道换热核心的一侧腔体,实现微通道换热器两侧腔体的物理隔离,从而开展单侧腔体水压试验,在水压试验过程中,由于薄板的外侧由高压水进行加压,薄板封闭的一侧微通道腔体充满水后,整体通道换热器核心只会处于压力平衡状态,而不会有较大的位移,或飞溅,从而降低了水压试验的危险性。
 939
0
939
0
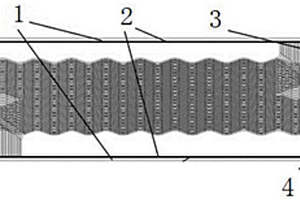
本发明公开了一种含氧化石墨烯的工程翻新轮胎胎面,包括以下重量份原料:基体橡胶,白炭黑,炭黑,改性氧化石墨烯,促进剂,硫化剂,防老剂,助剂,硬脂酸,氧化锌,芳烃油,防臭氧蜡,增粘剂;本发明将改性石墨烯溶液作为工程翻新轮胎胎面增强体材料,通过改性石墨烯增强胎面的配方设计、制备工艺设计、试样制备、增强性能测试,使其在胎面橡胶基体中更好地分散,从而发挥石墨烯对胎面橡胶基体最大的增强效果和载荷转移效应,有效提高了工程翻新轮胎胎面的抗崩花掉块、耐磨、耐刺扎等性能,尤其是含氧化石墨烯的胎面层与旧胎体层的界面粘结力进一步增强,有效降低了工程翻新轮胎胎面与胎体脱层的失效问题。
 852
0
852
0
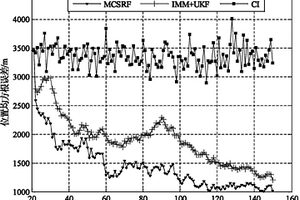
基于扩维漂移瑞利滤波的弹道导弹助推段跟踪方法,属于弹道导弹的助推段跟踪技术领域。它解决了现有弹道导弹助推段跟踪方法中,由于无法实现对轴向加速度和质量消耗速率的修正,而导致跟踪失效的问题。它采用双星领航/跟随星座构型彻底解决弹道导弹助推段跟踪的可观测性问题;其次采用交互式多模型的方法逼近主动段弹道真实模型,解决准确建模问题;最后推导修正集中式漂移瑞利滤波方法实现主动段连续跟踪,并在此基础上引入UT变换对滤波增益进行自适应调整,解决传统漂移瑞利滤波无法对平台和目标非对称状态进行修正的问题。本发明适用于弹道导弹助推段的跟踪。
 1181
0
1181
0
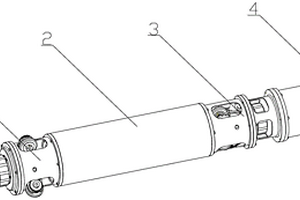
一种管道机器人,涉及机器人领域。为解决现有的管道机器人在管道内移动时,会出现驱动轮失效甚至卡死的现象,从而导致管道机器人无法在管道内部移动,并且无法适用不同管径的管道的问题。机器人主体为圆柱体状,机器人主体的一端与主动单元连接,机器人主体的另一端与从动端的一端连接,从动端的另一端与摄像头的底座连接;主动单元的构造如下,丝杠的一端穿过滑块与一号机架固定连接,滑块沿圆周外表面均与的设有n个支撑臂,n为正整数,每个支撑臂与支撑板铰接,且支撑板的的侧面设有驱动轮组件,丝杠的另一端依次穿过二号机架和轴套,与调整手轮固定连接,且轴套与二号机架之间嵌有轴承。本发明适用于管道探测领域。
 1276
0
1276
0
本发明涉及一种微通道换热核心的气压试验方法,属于微通道换热核心气压测试技术领域。本发明提供一种安全可靠的微通道换热核心的气压试验方法,降低微通道换热核心的潜在试验风险,同时避免微通道换热核心失效所带来的不必要的经济损失。本发明通过将微通道换热器核心置入一个有明确耐压能力的高压容器内,并通过氩弧焊用薄板封闭微通道换热核心的一侧腔体,实现微通道换热器两侧腔体的物理隔离,从而开展单侧腔体气压试验,在气压试验过程中,由于薄板的外侧由高压气进行加压,因此当气压撕裂微通道换热器核心的扩散焊缝微,整体通道换热器核心只会处于压力平衡状态,而不会有较大的位移,或飞溅,从而降低了气压试验的危险性。
 1015
0
1015
0
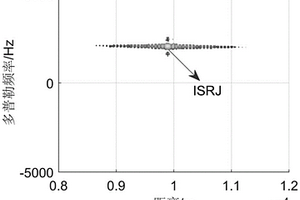
基于脉间频率编码脉内线性调频的间歇采样干扰抑制方法,涉及雷达抗干扰领域。本发明是为了解决现有间歇采样干扰抑制方法可实施性差,以及针对经过频率调制的间歇采样干扰时抑制会失效的问题。本发明包括:获取最优脉间频率编码脉内线性调频信号的回波;对回波进行脉冲压缩;将脉冲压缩结果在快时间维进行相位补偿;将相位补偿结果在慢时间维超分辨处理获得真假目标多普勒频率;利用真假目标多普勒频率构建设计斜投影矩阵;利用斜投影矩阵将相位补偿结果在慢时间维滤波处理;对滤波处理结果进行逆相位补偿;将逆相位补偿结果在慢时间维进行多普勒处理获得回波距离多普勒谱;利用回波距离多普勒谱实现目标有效探测。本发明用于抑制间歇采样干扰。
 1397
0
1397
0
本发明属于电气密封性能测试领域,特别涉及一种SF6断路器橡胶密封圈气密性试验装置。包括气密试验箱、水槽、固定支架以及气体回收系统。本发明SF6断路器老化橡胶密封圈气密性试验及气体回收装置可以对老化橡胶密封圈进行气密性试验,准确判断密封件是否失效,并且将试验用的SF6气体进行回收,避免其发生泄漏。本发明可有效提高密封可靠性,降低因气体泄漏引起SF6密度降低导致的安全事故发生,实现SF6回收安全性高和避免回收SF6时发生泄漏的目的,提高电力系统的运行稳定性。
 1017
0
1017
0
具有智能过流保护功能的无触点电机驱动装置,涉及一种电机驱动装置,本发明为解决现有电机驱动装置采用继电器控制电路,其继电器在频繁的开关切换下容易出现触点氧化失效和机械老化的问题,并且没有实时监测电机运行状况的装置,容易出现烧毁电机甚至引发火灾的问题。本发明所述无触点电机驱动装置,当电机为直流电机时,采用的驱动器为L298,采用单片机为驱动器L298提供控制信号;当电机为交流电机时,无触点电机驱动装置包括光耦、可控硅、单片机和三个电阻;具有过流保护功能的电路包括采样电阻R13和交流调理电路。本发明用于对直流电机和交流电机的驱动。
 1087
0
1087
0
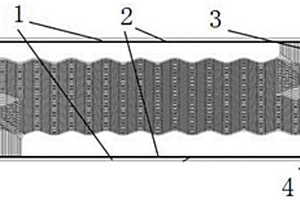
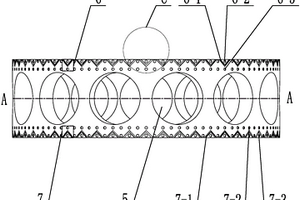
一种利用激光织构化制造抗磨损保持架的方法及滚动轴承,它涉及一种保持架制造方法及带有该方法制造保持架组成的滚动轴承。为解决因内、外套圈与保持架之间的润滑油剂被挤出,导致内、外套圈与保持架之间发生接触,引发疲劳剥落和磨粒磨损,最终保持架发生断裂导致轴承失效的问题。本发明中的方法包括水声探测步骤、保持架的粗细加工步骤、调试步骤、对焦步骤、表面织构加工步骤;滚动轴承包括外套圈、内套圈、保持架和多个滚动体,内套圈套装在外套圈的内部且二者同轴设置,保持架设置在外套圈和内套圈之间,多个滚动体一一对应设置在保持架上的多个兜孔内,保持架的外圆面上加工有多个上织构单元和多个下织构单元。本发明用于制造轴承过程中。
 1068
0
1068
0
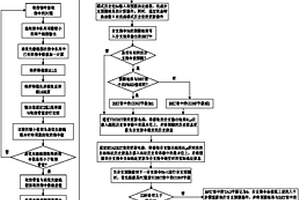
本发明提供的是一种基于同时多线程的取指控制方法。在处理器的每一个时钟周期,取指部件根据程序计数器读取指令的PC值,先选定两个优先级较高的线程作为取指线程,之后计算每个线程所需的实际指令数,进行读取指令的操作;双优先级资源分配机制按照线程IPC值和Cache失效率这两项参数,计算线程在取指阶段所需的系统资源,完成资源的动态分配操作;而TBHBP分支预测器则配合取指部件的取指操作,通过将读取到分支指令Bi的全局历史信息和局部历史信息进行连接,作为二级模式匹配表PHT的索引,获取模式匹配位Sc,将计算结果输入到分支结果输出表BRT;当分支指令Bi再次被执行时,通过选择器Selector判断CONF字段是否大于等于2,如果是则直接将记录的分支结果输出,最后将取到的指令放入指令Cache中,完成取指控制的全部操作。
 1372
0
1372
0
基于电磁阻尼器的主动式减振镗杆,属于机械加工领域,解决了现有基于阻尼器的主动式减振镗杆存在的容易失效或结构复杂,制造难度大的问题。本发明所述的基于电磁阻尼器的主动式减振镗杆包括杆体、电磁阻尼器、三轴加速度传感器和控制系统。在杆体的前端设置有刀头,刀头用于装夹刀片。电磁阻尼器设置在杆体的内部。当所述减振镗杆用于镗削加工时,三轴加速度传感器用于测量杆体的加速度数据,并将其发送至控制系统。控制系统用于调节电磁阻尼器的阻尼系数,直至其接收到的加速度数据达到最小。本发明所述的基于电磁阻尼器的主动式减振镗杆适用于精镗加工。
 1213
0
1213
0
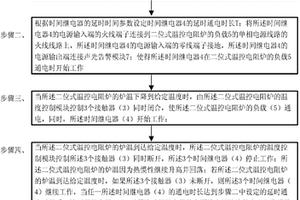
用设有时间继电器的二位式电阻炉进行热处理的方法及该电阻炉,涉及二位式电阻炉。目的是解决现有二位式温控电阻炉超温告警失效问题,空炉情况下对电阻炉初次加电,待炉温在原有温控系统的控制下第二次到达给定温度之后,继续对该电阻炉的负载供电直至炉温达到告警温度。测量从炉温第二次达到给定温度至达到告警温度的时长值,将该时长值作为时间继电器的延时通电时长,该继电器的电源输入端连接电阻炉负载的电源输入端的电源线路,时间继电器的电源输出端连接声光告警模块,当电阻炉负载单次通电时长达到所述时长值时,声光告警模块得电发出声光。本方法及该电阻炉具有当发生超温时进行告警的优点。适用于二位式电阻炉热处理加工。
1170
0
一种管道机器人,涉及机器人领域。为解决现有的管道机器人在管道内移动时,会出现驱动轮失效甚至卡死的现象,从而导致管道机器人无法在管道内部移动,并且无法适用不同管径的管道的问题。机器人主体为圆柱体状,机器人主体的一端与主动单元连接,机器人主体的另一端与从动端的一端连接,从动端的另一端与摄像头的底座连接;主动单元的构造如下,丝杠的一端穿过滑块与一号机架固定连接,滑块沿圆周外表面均与的设有n个支撑臂,n为正整数,每个支撑臂与支撑板铰接,且支撑板的的侧面设有驱动轮组件,丝杠的另一端依次穿过二号机架和轴套,与调整手轮固定连接,且轴套与二号机架之间嵌有轴承。本发明适用于管道探测领域。
 1420
0
1420
0
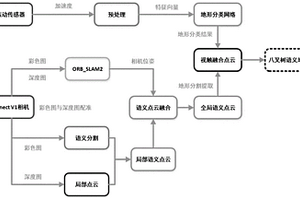
本发明提出一种基于视觉和振动触觉融合的地形语义感知方法,首先基于ORB_SLAM2和语义分割给出了视觉三维语义建图的实现方法;其次结合基于CNN‑LSTM的地形语义分类识别方法,给出了视/触融合的实现思路和融合策略;最后基于蓝鲸XQ无人车平台、Kinect V1.0视觉传感单元以及振动传感单元在实物环境下进行了算法测试,通过对比测试结果和真实环境可以得到所提方法的语义标记精度满足应用的需求,同时有无振动触觉的融合结果可以明显对比出对地形语义认知的好坏,故通过两者的融合可以为巡视器提供更加可靠的感知能力,即使在视觉失效的情况下,振动触觉依然可以提供有限范围内的地形认知精度。
 827
0
827
0
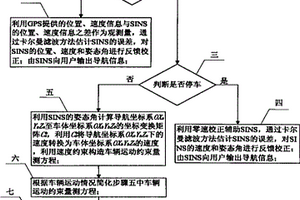
车载SINS/GPS组合导航系统性能增强方法。本发明涉及导航技术领域, 它解决了现有车载SINS/GPS组合导航系统所存在的GPS暂时失效时系统精 度低与可靠性差的问题,步骤如下:首先判断GPS是否有效;有效,利用 GPS提供的位置、速度信息与SINS的位置、速度信息之差作为观测量,通 过卡尔曼滤波方法估计SINS的误差,校正;无效,判断是否停车;停车, 利用零速校正辅助SINS,校正;行进,利用SINS的姿态角计算导航坐标系 至车体坐标系的坐标变换矩阵Cnb,利用Cnb将导航坐标系下的速度转换为车体 坐标系下的速度,利用速度约束构造车辆运动约束量测方程;根据车辆运动 情况简化该方程;利用车辆运动约束辅助SINS,将SINS与车辆运动约束进 行速度组合,校正。它用于提高车载SINS/GPS组合导航系统的精度与可靠 性。
1248
0
本发明涉及一种微通道换热核心的气压试验方法,属于微通道换热核心气压测试技术领域。本发明提供一种安全可靠的微通道换热核心的气压试验方法,降低微通道换热核心的潜在试验风险,同时避免微通道换热核心失效所带来的不必要的经济损失。本发明通过将微通道换热器核心置入一个有明确耐压能力的高压容器内,并通过氩弧焊用薄板封闭微通道换热核心的一侧腔体,实现微通道换热器两侧腔体的物理隔离,从而开展单侧腔体气压试验,在气压试验过程中,由于薄板的外侧由高压气进行加压,因此当气压撕裂微通道换热器核心的扩散焊缝微,整体通道换热器核心只会处于压力平衡状态,而不会有较大的位移,或飞溅,从而降低了气压试验的危险性。
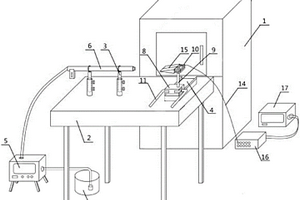
一种考核飞行器热端部位结构件抗热冲击性能的喷水雾试验系统及其使用方法,涉及热端部位结构件抗热冲击性能的试验系统及其使用方法。解决现有飞行器热端部位结构件的抗热冲击性能考核方法不足的问题。试验系统包括马弗炉加热装置、水平试验平台装置、喷水雾快速降温装置、热端部位结构件夹持工装、工装移动杆以及测温装置;方法:一、将热电偶置于陶瓷保护管内,固定在飞行器热端部位结构件上,连接接线器及数据采集仪;二、将紧固夹具与底座连接,然后将粘贴有热电偶热端部位结构件置于紧固夹具中,然后置于定位槽上,调节位置;三、加热热端部位结构件,取出置于定位槽上,喷水雾热冲击并测量降温曲线;四、观察宏观裂纹判断结构件是否失效。
1135
0
基于脉间频率编码脉内线性调频的间歇采样干扰抑制方法,涉及雷达抗干扰领域。本发明是为了解决现有间歇采样干扰抑制方法可实施性差,以及针对经过频率调制的间歇采样干扰时抑制会失效的问题。本发明包括:获取最优脉间频率编码脉内线性调频信号的回波;对回波进行脉冲压缩;将脉冲压缩结果在快时间维进行相位补偿;将相位补偿结果在慢时间维超分辨处理获得真假目标多普勒频率;利用真假目标多普勒频率构建设计斜投影矩阵;利用斜投影矩阵将相位补偿结果在慢时间维滤波处理;对滤波处理结果进行逆相位补偿;将逆相位补偿结果在慢时间维进行多普勒处理获得回波距离多普勒谱;利用回波距离多普勒谱实现目标有效探测。本发明用于抑制间歇采样干扰。
 1341
0
1341
0
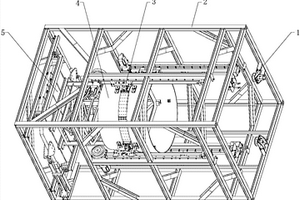
本发明提供一种模拟火箭分离半实物实验平台,包含整体框架结构、加载装置、传动装置和缓冲装置。加载装置包括加载平台和力加载组件,加载平台用于分离导向装置的安装、固定和对心。力加载组件,用于在安装测试实验件时提供方便以及模拟在测试各种分离情况时相应的环境参数。传动装置由移动滑台组件和抱紧环组成。移动滑台组件用于实现分离导向机构分离运动的运动模拟,抱紧环的作用是固定火箭壳体。缓冲装置利用阻尼器使试验件缓冲减速,防止试验件冲击框架结构。本发明填补了火箭分离纯计算机数值仿真方法的不足,克服了火箭分离实验无法提供真实环境参数的缺点。本发明可实现模拟火箭多种推力失效组合情况下的分离实验。
 977
0
977
0
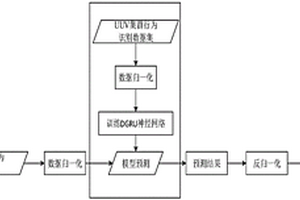
本发明为一种基于DGRU神经网络的UUV集群行为识别方法,属于深度学习领域;本发明对GRU神经网络进行改进,提出了防止信息丢失的DGRU神经网络,并应用DGRU神经网路建立欠驱动UUV集群行为识别模型;本发明包括数据预处理阶段、模型训练阶段和模型预测阶段,具体包括如下步骤:(1)对UUV集群行为数据集进行数据清洗;(2)利用数据预处理后的数据集训练DGRU神经网络,建立UUV集群行为识别模型;(3)获取当前软件失效数据并采用(1)中同样的方法进行数据归一化处理,然后输入(2)中获得的预测模型进行UUV的集群行为识别,得到识别结果;应用该模型可以精确识别欠驱动UUV集群行为的方法,克服了传统UUV集群性行为识别技术的缺点。
北方有色为您提供最新的黑龙江有色金属失效分析技术理论与应用信息,涵盖发明专利、权利要求、说明书、技术领域、背景技术、实用新型内容及具体实施方式等有色技术内容。打造最具专业性的有色金属技术理论与应用平台!

 2026年03月20日 ~ 22日
2026年03月20日 ~ 22日  2026年03月20日 ~ 22日
2026年03月20日 ~ 22日  2026年03月25日 ~ 27日
2026年03月25日 ~ 27日  2026年03月26日 ~ 28日
2026年03月26日 ~ 28日  2026年03月27日 ~ 29日
2026年03月27日 ~ 29日 





































































