1.本发明涉及燃料电池技术领域,特别涉及一种燃料电池用离心式空压机防喘振结构及其控制方法。
背景技术:
2.随着燃料电池产业的发展,燃料电池系统的环境适应性越来越受到重视,尤其是环境(尤其是海拔以及环境温度等环境参数)适用性指标。空压机是燃料电池空气子系统核心的压力、流量调节部件,目前行业内最常用的空压机类型是离心式,离心式空压机具有噪音低、性能高、可通过空气轴承实现无油、压比合适、结构紧凑等优势,但离心式空压机有个重要特点就是当其工作在低流量、高压比的情况下容易发生气流振荡,通常称为喘振现象。当空压机发生喘振时,会导致空气流量不可控、噪声大、振动大和温升高等一些列连锁反应,严重时甚至可能会损坏空压机。空压机的工作介质是工作环境中的空气,不同环境工况下,环境气压以及环境空气密度等相应变化,容易引起空压机工作区间进入喘振区,不仅可能造成空压机自身损坏,也直接影响燃料电池系统的空气供应,严重时将损坏燃料电池堆。因此,如何防止空压机喘振具有重要意义。
3.目前行业内常用的防喘振方法之一是在电堆出口设置抽气装置,将空气路的流量快速抽出,加快电堆空气路的流速,相当于提高空压机工作流量,使空压机跳出喘振区;但此方法会导致进入电堆的空气流量高于需求流量,可能导致过量的空气降低电堆内膜电极湿度引起膜干现象,从而导致电堆性能降低,同时由于增大了空压机功率,也会导致降低燃料电池系统效率。还有一种防喘振方法是在空压机出口设置排气管路,提高空压机工作流量,多余的流量通过排气管路直接排放到大气中。此方法不影响电堆需求的压力、流量供应,但是会增加的空压机功耗,也会造成燃料电池系统效率降低。而且以上方法都是仅通过直接加大空压机工作流量以避开喘振区防止喘振现象,相应地会导致增大空压机的工作负荷,使得空压机功耗增大;且无法结合环境工况对空压机的调节优化。
4.
技术实现要素:
本发明的主要目的是提出一种燃料电池用离心式空压机防喘振结构及其控制方法,旨在能够结合环境工况对空压机进行调节优化,在不增加空压机负荷以及确保燃料电池系统效率的前提下使得空压机避开喘振区,从而达到空压机防喘振的目的。
5.为实现上述目的,本发明提出一种燃料电池用离心式空压机防喘振结构,包括电堆以及进气管路,所述进气管路与所述电堆的空气入口连通;所述进气管路包括依次连接的空气滤清器、空气流量计、空压机、中冷器以及增湿器的第一侧,所述进气管路还包括第一调节支路以及第二调节支路,所述第一调节支路的入口端设置在所述空压机与所述中冷器之间,所述第一调节支路上设置有第一旁通阀;所述第二调节支路的入口端设置在所述中冷器与所述增湿器之间,所述第二调节支路上设置有第二旁通阀;所述第一调节支路以
及所述第二调节支路的出口端均设置在所述空气流量计与所述空压机之间。
6.可选地,所述空气滤清器与所述空气流量计之间设有第一温度
传感器以及第一压力传感器,所述第一温度传感器以及所述第一压力传感器分别用于采集环境温度ta以及环境气压pa。
7.可选地,所述空气流量计与所述空压机之间设有第二压力传感器,所述空压机与所述中冷器之间设有第三压力传感器,所述第二压力传感器以及所述第三压力传感器分别用于采集所述空压机的入口处以及出口处的实时气压p1和p2;所述电堆的空气入口处设置有第四压力传感器,所述第四压力传感器用于采集入堆气压pin。
8.可选地,所述空气流量计与所述空压机之间设有第二温度传感器,所述第二温度传感器用于采集所述空压机入口处的实时温度tin。
9.可选地,包括出气管路,所述出气管路与所述电堆的空气出口连通,所述出气管路包括依次连接的所述增湿器的第二侧、背压阀以及排气管。
10.为实现上述目的,本发明还提出一种燃料电池用离心式空压机防喘振控制方法,包括如下步骤:采集环境温度ta以及环境气压pa;判断环境温度ta是否小于预设温度范围;若环境温度ta小于预设温度范围,则将第一旁通阀的开度eb按照非线性函数eb=f(ta)进行调节;否则,所述第一旁通阀关闭;判断环境气压pa是否小于预设气压范围;若环境气压pa小于预设气压范围,则将第二旁通阀的开度ep按照非线性函数ep=f(pa)进行调节;否则,所述第二旁通阀关闭。
11.可选地,所述预设温度范围为25
±
5℃,所述预设气压范围为101.325
±
5kpaa。
12.可选地,所述非线性函数eb=f(ta)的获取方法包括如下步骤:在-30~20℃之间取若干温度点定义为t1、t2、
···
tn;在环境温度t1下,当空气经第一调节支路回流混合后再次进入空压机入口处的实时温度tin达到25
±
5℃范围时,记录此时第一旁通阀开度eb1;其中空压机入口处的实时温度tin通过第二温度传感器获得;重复上述步骤以获得多组环境温度tn与第一旁通阀开度ebn的对应关系,并将上述数据拟合得到非线性函数关系eb=f(ta)。
13.可选地,所述非线性函数ep=f(pa)的获取方法包括如下步骤:在80~95.325kpaa之间取若干气压点定义为p1、p2、
···
pn;在环境气压p1下,当空气经第二调节支路回流混合后再次进入空压机入口处的实时压力p1达到101.325
±
5kpaa范围时,记录此时第二旁通阀开度ep1;其中空压机入口处的实时压力p1通过第二压力传感器获得。
14.重复上述步骤以获得多组环境压力pn与第二旁通阀epn的对应关系,并将上述数据拟合得到非线性函数关系ep=f(pa)。
15.可选地,所述采集环境温度ta以及环境气压pa的步骤之后,还包括如下步骤:若环境温度ta处于预设温度范围且环境气压pa处于预设气压范围,则利用燃料电池pid控制算法,根据空压机工作流量m以及入堆气压pin与当前电流in的对应关系获得入堆需求流量mn和入堆需求压力ptn;其中空压机工作流量m通过空气流量计获得,入堆空气压力pin通过第四压力传感器获得;
根据所述入堆需求流量mn对空压机转速进行调节,以及根据入堆需求压力ptn对背压阀开度进行调节。
16.与现有技术相比,本发明的有益效果:现有的离心式空压机一般会有在25℃、1atm标准大气压(101.325kpaa)下测得的气动性能图,简称map,其代表在该环境工况下空压机工作流量-压比的关系图,其中map上左边界线外即为空压机喘振区,高压比、小流量工况。防止空压机喘振就需要提高空气流量或者降低压比,使空压机工作在喘振线之下。在相关技术中,防喘振方法一般是直接加大空压机工作流量,如此会导致空压机负荷增加,或者,可能引入过量的空气进入电堆导致膜干现象降低电堆性能,进一步降低燃料电池系统输出功率和效率,且并没有对不同的环境工况变化进行优化。
17.本发明通过第一调节支路以及第二调节支路的配合作用,能够结合环境工况变化对空压机工作流量以及压比进行调节,在不增加空压机负荷以及确保燃料电池系统效率的前提下,使其避开空压机喘振区,以达到空压机防喘振的目的。一方面,通过回流空压机出口的高压或高温空气,对高海拔或者低温环境导致的喘振现象进行补偿,有利于提高燃料电池系统环境适应性。另一方面,通过回收空压机出口的能量避开空压机喘振区,而不增加空压机负荷,此外,也能避免直接加大入堆空气流量导致电堆膜干而降低电堆性能。
18.具体的,当环境温度较低(例如冬季),此时环境温度ta低于预设温度范围,而环境气压pa在预设气压范围内,则主要是存在空气温度低、空气密度大、空压机工作流量变相降低,工作点在map上向左偏移靠近喘振区导致的喘振的风险。此时,通过第一调节支路对空压机入口空气进行温度补偿。经空压机压缩后的空气,压力、温度都有升高,经第一调节支路回流的部分高温空气与环境进入的新鲜空气进行混合再进入空压机,一方面,空气温度提升,工作流量点维持;另一方面,空压机入口处实时压力p1提升,空压机工作压比pr(pr=空压机出口实时压力p2/空压机入口实时压力p1)降低,工作点在map上向下偏移远离喘振区。且回收部分空压机出口气体中的能量,空压机做功减少,可降低一定的空压机功耗。其中,第一调节支路中的第一旁通阀开度eb按照非线性函数eb=f(ta)进行调节。
19.当环境气压较低(例如高海拔地区),此时环境温度ta在预设温度范围内,而环境气压pa低于预设气压范围,则主要是存在大气压降低、空压机入口压力降低、空压机工作压比提高,工作点在map上向上偏移靠近喘振区导致的喘振的风险。此时,通过第二调节支路对空压机入口空气进行压力补偿。经中冷器冷却后的空气,压力提升且温度较空压机出口低,经第二调节支路回流的部分中温高压空气与环境进入的新鲜空气进行混合再进入空压机,一方面,不引入过多的热量是空气温度提升较大幅度,工作流量点相对维持;另一方面,中和较低的大气压、空压机入口实时压力p1提升,空压机工作压比pr(pr=空压机出口实时压力p2/空压机入口实时压力p1)降低,工作点在map上向下偏移远离喘振区。且回收部分空压机出口气体中的能量,空压机做功减少,可降低一定的空压机功耗。其中,第二调节支路中的第二旁通阀开度ep按照非线性函数ep=f(pa)进行调节。
20.当环境温度和环境气压都较低,此时环境温度ta以及环境气压pa都低于预设温度范围以及预设气压范围,则通过结合第一调节支路以及第二调节支路对空压机入口空气温度以及气压同步进行补偿。其中第一旁通阀和第二旁通阀的开度eb和ep同时按照上述非线
性函数eb=f(ta)和ep=f(pa)进行控制补偿。
附图说明
21.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
22.图1为本发明燃料电池用离心式空压机防喘振结构一实施例的结构示意图;图2为本发明燃料电池用离心式空压机防喘振控制方法一实施例的步骤流程图其一;图3为本发明燃料电池用离心式空压机防喘振控制方法一实施例的步骤流程图其二;图4为本发明燃料电池用离心式空压机防喘振控制方法一实施例的步骤流程图其三;图5为本发明燃料电池用离心式空压机防喘振控制方法一实施例的步骤流程图其四;图6为在25℃、1atm标准大气压(101.325kpaa)下离心式空压机气动性能图(简称map)。
23.图中所标各部件的名称如下:本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
24.下面将结合本发明中的附图,对本发明中的技术方案进行清楚、完整地描述,显然,所描述的仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本
发明保护的范围。
25.需要说明,若本发明实施例中有涉及方向性指示(诸如上、下、左、右、前、后
……
),则该方向性指示仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
26.另外,若本发明中涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
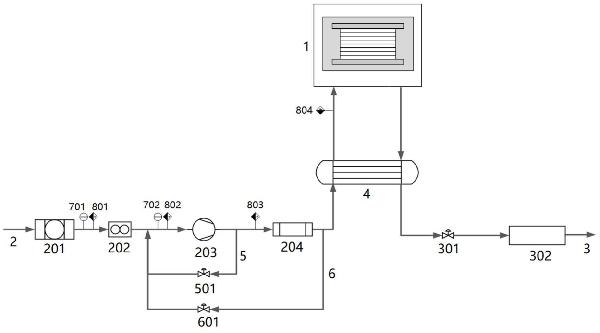
27.本实施例公开了一种燃料电池用离心式空压机防喘振结构,参考附图1,包括电堆1以及进气管路2,进气管路2与电堆1的空气入口连通;进气管路2包括依次连接的空气滤清器201、空气流量计202、空压机203、中冷器204以及增湿器4的第一侧,进气管路2还包括第一调节支路5以及第二调节支路6,第一调节支路5的入口端设置在空压机203与中冷器204之间,第一调节支路5上设置有第一旁通阀501;第二调节支路6的入口端设置在中冷器204与增湿器4之间,第二调节支路6上设置有第二旁通阀601;第一调节支路5以及第二调节支路6的出口端均设置在空气流量计202与空压机203之间。
28.本实施例通过第一调节支路5以及第二调节支路6的配合作用,能够结合环境工况变化对空压机203工作流量以及压比进行调节,在不增加空压机203负荷以及确保燃料电池系统效率的前提下,使其避开空压机203喘振区,以达到空压机203防喘振的目的。一方面,通过回流空压机203出口的高压或高温空气,对高海拔或者低温环境导致的喘振现象进行补偿,有利于提高燃料电池系统环境适应性。另一方面,通过回收空压机203出口的能量避开空压机203喘振区,而不增加空压机203负荷,此外,也能避免直接加大入堆空气流量导致电堆1膜干而降低电堆1性能。
29.具体的,空气滤清器201与空气流量计202之间设有第一温度传感器701以及第一压力传感器801,第一温度传感器701以及第一压力传感器801分别用于采集环境温度ta以及环境气压pa。如此设置,由于第一温度传感器701以及第一压力传感器801均设置在空气滤清器201与空气流量计202之间,利用对空气进行检测以分别采集环境温度ta以及环境气压pa,结构简单实用性强。
30.具体的,空气流量计202与空压机203之间设有第二压力传感器802,空压机203与中冷器204之间设有第三压力传感器803,第二压力传感器802以及第三压力传感器803分别用于采集空压机203的入口处以及出口处的实时气压p1和p2;电堆1的空气入口处设置有第四压力传感器804,第四压力传感器804用于采集入堆气压pin。如此设置,通过第二压力传感器802以及第三压力传感器803分别用于采集空压机203的入口处以及出口处的实时气压p1和p2以测量空压机203的压比,通过第四压力传感器804以采集入堆气压pin,便于后续对第一旁通阀501以及第二旁通阀601开度进行调节。
31.具体的,空气流量计202与空压机203之间设有第二温度传感器702,第二温度传感器702用于采集空压机203入口处的实时温度tin。如此设置,利用第二温度传感器702采集空压机203入口处的实时温度tin,便于后续利用空压机203入口处的实时温度tin对第一旁
通阀501以及第二旁通阀601开度进行调节。
32.具体的,包括出气管路3,出气管路3与电堆1的空气出口连通,出气管路3包括依次连接的增湿器4的第二侧、背压阀301以及排气管302。如此设置,通过调节背压阀301开度以达到满足入堆需求压力ptn的目的,结构简单实用性强。
33.结合上述关于燃料电池用离心式空压机防喘振结构,本实施例还公开了一种燃料电池用离心式空压机防喘振控制方法,包括如下步骤:步骤s10;采集环境温度ta以及环境气压pa;在上述步骤中,预设温度范围为25
±
5℃,预设气压范围为101.325
±
5kpaa。如此设置,考虑到本实施例是根据在25℃、1atm标准大气压(101.325kpaa)下的离心式空压机气动性能图进行研究分析,因此将预设温度范围以及预设气压范围设置在25℃、1atm标准大气压(101.325kpaa)的上下幅度范围内。
34.步骤s20;判断环境温度ta是否小于预设温度范围;若环境温度ta小于预设温度范围,则将第一旁通阀501的开度eb按照非线性函数eb=f(ta)进行调节;否则,第一旁通阀501关闭;步骤s30;判断环境气压pa是否小于预设气压范围;若环境气压pa小于预设气压范围,则将第二旁通阀601的开度ep按照非线性函数ep=f(pa)进行调节;否则,第二旁通阀601关闭。
35.由于现有的离心式空压机203一般会有在25℃、1atm标准大气压(101.325kpaa)下测得的气动性能图(简称map,如附图6所示,要说明的是此图仅作为本专利说明示例图,不指代某型号空压机),其代表在该环境工况下空压机203工作流量-压比的关系图,其中map上左边界线外即为空压机喘振区,高压比、小流量工况。防止空压机喘振就需要提高空气流量或者降低压比,使空压机203工作在喘振线之下。在相关技术中,防喘振方法一般是直接加大空压机203工作流量,如此会导致空压机203负荷增加,或者,可能引入过量的空气进入电堆1导致膜干现象降低电堆1性能,进一步降低燃料电池系统输出功率和效率,且并没有对不同的环境工况变化进行优化。
36.具体的,当环境温度较低(例如冬季),此时环境温度ta低于预设温度范围,而环境气压pa在预设气压范围内,则主要是存在空气温度低、空气密度大、空压机203工作流量变相降低,工作点在map上向左偏移靠近喘振区导致的喘振的风险。此时,通过第一调节支路5对空压机203入口空气进行温度补偿。经空压机203压缩后的空气,压力、温度都有升高,经第一调节支路5回流的部分高温空气与环境进入的新鲜空气进行混合再进入空压机203,一方面,空气温度提升,工作流量点维持;另一方面,空压机203入口处实时压力p1提升,空压机203工作压比pr(pr=空压机203出口实时压力p2/空压机203入口实时压力p1)降低,工作点在map上向下偏移远离喘振区。且回收部分空压机203出口气体中的能量,空压机203做功减少,可降低一定的空压机203功耗。其中,第一调节支路5中的第一旁通阀501开度eb按照非线性函数eb=f(ta)进行调节。
37.当环境气压较低(例如高海拔地区),此时环境温度ta在预设温度范围内,而环境气压pa低于预设气压范围,则主要是存在大气压降低、空压机203入口压力降低、空压机203工作压比提高,工作点在map上向上偏移靠近喘振区导致的喘振的风险。此时,通过第二调
节支路6对空压机203入口空气进行压力补偿。经中冷器204冷却后的空气,压力提升且温度较空压机203出口低,经第二调节支路6回流的部分中温高压空气与环境进入的新鲜空气进行混合再进入空压机203,一方面,不引入过多的热量是空气温度提升较大幅度,工作流量点相对维持;另一方面,中和较低的大气压、空压机203入口实时压力p1提升,空压机203工作压比pr(pr=空压机203出口实时压力p2/空压机203入口实时压力p1)降低,工作点在map上向下偏移远离喘振区。且回收部分空压机203出口气体中的能量,空压机203做功减少,可降低一定的空压机203功耗。其中,第二调节支路6中的第二旁通阀601开度ep按照非线性函数ep=f(pa)进行调节。
38.当环境温度和环境气压都较低,此时环境温度ta以及环境气压pa都低于预设温度范围以及预设气压范围,则通过结合第一调节支路5以及第二调节支路6对空压机203入口空气温度以及气压同步进行补偿。其中第一旁通阀501和第二旁通阀601的开度eb和ep同时按照上述非线性函数eb=f(ta)和ep=f(pa)进行控制补偿。
39.具体的,在步骤s20中,参考附图3,非线性函数eb=f(ta)的获取方法包括如下步骤:步骤s21;在-30~20℃之间取若干温度点定义为t1、t2、
···
tn;步骤s22;在环境温度t1下,当空气经第一调节支路5回流混合后再次进入空压机203入口处的实时温度tin达到25
±
5℃范围时,记录此时第一旁通阀501开度eb1;其中空压机203入口处的实时温度tin通过第二温度传感器702获得;步骤s23;重复步骤s22以获得多组环境温度tn与第一旁通阀501开度ebn的对应关系,并将上述数据拟合得到非线性函数关系eb=f(ta)。
40.如此设置,通过在-30~20℃之间划分若干温度点并分别定义为t1、t2、
···
tn;再通过测量多组环境温度tn与第一旁通阀501开度ebn的对应关系,利用其数据拟合得到非线性函数关系eb=f(ta),以便能够利用eb=f(ta)对不同环境工况的第一旁通阀501开度进行调节。并且,能够通过非线性函数关系eb=f(ta)推测出其他非预设气压点tn所对应的第一旁通阀501ebn,使得能够适应不同环境工况对空压机203进行调节。
41.具体的,在步骤s30中,参考附图4,非线性函数ep=f(pa)的获取方法包括如下步骤:步骤s31;在80~95.325kpaa之间取若干气压点定义为p1、p2、
···
pn;步骤s32;在环境气压p1下,当空气经第二调节支路6回流混合后再次进入空压机203入口处的实时压力p1达到101.325
±
5kpaa范围时,记录此时第二旁通阀601开度ep1;其中空压机203入口处的实时压力p1通过第二压力传感器802获得。
42.步骤s23;重复步骤s32以获得多组环境压力pn与第二旁通阀601epn的对应关系,并将上述数据拟合得到非线性函数关系ep=f(pa)。
43.如此设置,通过80~95.325kpaa之间划分若干气压点并分别定义为p1、p2、
···
pn;再通过测量多组环境压力pn与第二旁通阀601epn的对应关系,利用其数据拟合得到非线性函数关系ep=f(pa),以便能够利用ep=f(pa)对不同环境工况的第二旁通阀601开度进行调节;并且,能够通过非线性函数关系ep=f(pa)推测出其他非预设气压点pn所对应的第二旁通阀601epn,使得能够适应不同环境工况对空压机203进行调节。
44.具体的,在步骤s10之后,参考附图5,还包括如下步骤:
步骤s41;若环境温度ta处于预设温度范围且环境气压pa处于预设气压范围,则利用燃料电池pid控制算法,根据空压机203工作流量m以及入堆气压pin与当前电流in的对应关系获得入堆需求流量mn和入堆需求压力ptn;其中空压机203工作流量m通过空气流量计202获得,入堆空气压力pin通过第四压力传感器804获得;步骤s42;根据入堆需求流量mn对空压机203转速进行调节,以及根据入堆需求压力ptn对背压阀301开度进行调节。
45.如此设置,当环境温度ta处于预设温度范围且环境气压pa处于预设气压范围,则则利用燃料电池pid控制算法,根据空压机203工作流量m以及入堆气压pin与当前电流in的对应关系获得入堆需求流量mn和入堆需求压力ptn;其中空压机203工作流量m通过空气流量计202获得,入堆空气压力pin通过第四压力传感器804获得;再根据入堆需求流量mn对空压机203转速进行调节,以及根据入堆需求压力ptn对背压阀301开度进行调节;操作简单实用性强。
46.需要说明的是,本发明公开的燃料电池用离心式空压机防喘振结构及其控制方法的其它内容为现有技术,在此不再赘述。
47.以上仅为本发明的可选实施例,并非因此限制本发明的专利范围,凡是在本发明直接/间接运用在其他相关的技术领域均包括在本发明的专利保护范围内。技术特征:
1.一种燃料电池用离心式空压机防喘振结构,其特征在于:包括电堆以及进气管路,所述进气管路与所述电堆的空气入口连通;所述进气管路包括依次连接的空气滤清器、空气流量计、空压机、中冷器以及增湿器的第一侧,所述进气管路还包括第一调节支路以及第二调节支路,所述第一调节支路的入口端设置在所述空压机与所述中冷器之间,所述第一调节支路上设置有第一旁通阀;所述第二调节支路的入口端设置在所述中冷器与所述增湿器之间,所述第二调节支路上设置有第二旁通阀;所述第一调节支路以及所述第二调节支路的出口端均设置在所述空气流量计与所述空压机之间。2.根据权利要求1所述的燃料电池用离心式空压机防喘振结构,其特征在于:所述空气滤清器与所述空气流量计之间设有第一温度传感器以及第一压力传感器,所述第一温度传感器以及所述第一压力传感器分别用于采集环境温度ta以及环境气压pa。3.根据权利要求1所述的燃料电池用离心式空压机防喘振结构,其特征在于:所述空气流量计与所述空压机之间设有第二压力传感器,所述空压机与所述中冷器之间设有第三压力传感器,所述第二压力传感器以及所述第三压力传感器分别用于采集所述空压机的入口处以及出口处的实时气压p1和p2;所述电堆的空气入口处设置有第四压力传感器,所述第四压力传感器用于采集入堆气压pin。4.根据权利要求1所述的燃料电池用离心式空压机防喘振结构,其特征在于:所述空气流量计与所述空压机之间设有第二温度传感器,所述第二温度传感器用于采集所述空压机入口处的实时温度tin。5.根据权利要求1所述的燃料电池用离心式空压机防喘振结构,其特征在于:包括出气管路,所述出气管路与所述电堆的空气出口连通,所述出气管路包括依次连接的所述增湿器的第二侧、背压阀以及排气管。6.一种燃料电池用离心式空压机防喘振控制方法,其特征在于:包括如下步骤:采集环境温度ta以及环境气压pa;判断环境温度ta是否小于预设温度范围;若环境温度ta小于预设温度范围,则将第一旁通阀的开度eb按照非线性函数eb=f(ta)进行调节;否则,所述第一旁通阀关闭;判断环境气压pa是否小于预设气压范围;若环境气压pa小于预设气压范围,则将第二旁通阀的开度ep按照非线性函数ep=f(pa)进行调节;否则,所述第二旁通阀关闭。7.根据权利要求6所述的燃料电池用离心式空压机防喘振控制方法,其特征在于:所述预设温度范围为25
±
5℃,所述预设气压范围为101.325
±
5kpaa。8.根据权利要求6所述的燃料电池用离心式空压机防喘振控制方法,其特征在于:所述非线性函数eb=f(ta)的获取方法包括如下步骤:在-30~20℃之间取若干温度点定义为t1、t2、
···
tn;在环境温度t1下,当空气经第一调节支路回流混合后再次进入空压机入口处的实时温度tin达到25
±
5℃范围时,记录此时第一旁通阀开度eb1;其中空压机入口处的实时温度tin通过第二温度传感器获得;重复上述步骤以获得多组环境温度tn与第一旁通阀开度ebn的对应关系,并将上述数据拟合得到非线性函数关系eb=f(ta)。9.根据权利要求6所述的燃料电池用离心式空压机防喘振控制方法,其特征在于:所述非线性函数ep=f(pa)的获取方法包括如下步骤:
在80~95.325kpaa之间取若干气压点定义为p1、p2、
···
pn;在环境气压p1下,当空气经第二调节支路回流混合后再次进入空压机入口处的实时压力p1达到101.325
±
5kpaa范围时,记录此时第二旁通阀开度ep1;其中空压机入口处的实时压力p1通过第二压力传感器获得;重复上述步骤以获得多组环境压力pn与第二旁通阀epn的对应关系,并将上述数据拟合得到非线性函数关系ep=f(pa)。10.根据权利要求6所述的燃料电池用离心式空压机防喘振控制方法,其特征在于:所述采集环境温度ta以及环境气压pa的步骤之后,还包括如下步骤:若环境温度ta处于预设温度范围且环境气压pa处于预设气压范围,则利用燃料电池pid控制算法,根据空压机工作流量m以及入堆气压pin与当前电流in的对应关系获得入堆需求流量mn和入堆需求压力ptn;其中空压机工作流量m通过空气流量计获得,入堆空气压力pin通过第四压力传感器获得;根据所述入堆需求流量mn对空压机转速进行调节,以及根据入堆需求压力ptn对背压阀开度进行调节。
技术总结
本发明公开了一种燃料电池用离心式空压机防喘振结构及其控制方法,包括电堆以及进气管路;所述进气管路包括依次连接的空气滤清器、空气流量计、空压机、中冷器以及增湿器的第一侧,所述进气管路还包括第一调节支路以及第二调节支路,所述第一调节支路的入口端设置在所述空压机与所述中冷器之间,所述第一调节支路上设置有第一旁通阀;所述第二调节支路的入口端设置在所述中冷器与所述增湿器之间,所述第二调节支路上设置有第二旁通阀。通过本发明能够结合环境工况对空压机进行调节优化,在不增加空压机负荷以及确保燃料电池系统效率的前提下使得空压机避开喘振区,从而达到空压机防喘振的目的。防喘振的目的。防喘振的目的。
技术研发人员:潘艳艳 曹桂军
受保护的技术使用者:深圳市氢蓝时代动力科技有限公司
技术研发日:2023.03.14
技术公布日:2023/7/4
声明:
“燃料电池用离心式空压机防喘振结构及其控制方法与流程” 该技术专利(论文)所有权利归属于技术(论文)所有人。仅供学习研究,如用于商业用途,请联系该技术所有人。
我是此专利(论文)的发明人(作者)
 787
编辑:北方有色网
来源:深圳市氢蓝时代动力科技有限公司
787
编辑:北方有色网
来源:深圳市氢蓝时代动力科技有限公司



 咨询细节
咨询细节











































































 2026年08月06日 ~ 08日
2026年08月06日 ~ 08日 















