全部
▼
热搜:
 972
972
 0
0
本发明涉及一种地下采矿技术,特别涉及一种高 分段无底柱分段崩落采矿模型,解决受传统放矿理论中无底柱 分段崩落采矿法结构参数的确定方法只能是靠生产经验和工 程类比的技术缺陷,实现了无底柱分段崩落采矿法采场结构参 数由建立的数学模型精确计算,提高了矿山的生产效率和技术 经济指标。具体技术方案如下:一种高分段无底柱分段崩落采 矿模型,选定分段高度后,确定放矿高度 Hf,根据关系式[2]C=0.000819Hf2-0.025Hf+2.578确定C,再根据H =(/2)×C×L的方法确定进路间距L。本发明主要适 用于地下矿山的开采,技术方案简单、确定的采场结构参数准 确性高;本发明技术方案确定的采场结构参数所获的技术经济 指标明显优于传统技术方案确定的结构参数所获得的技术经 济指标。
 851
0
851
0
本发明涉及一种铅锌矿体开采用垂直交叉矩形进路式盘区下向胶结充填采矿工艺,属于采矿技术领域;所述的垂直交叉矩形进路式下向胶结充填采矿工艺将矿体划分为中段、分段和分层和盘区,其中,一个中段负责2‑6个分段,一个分段负责2‑4个分层,一个分段沿矿体走向又划分为多个盘区;回采过程中,一个盘区作为一个回采单元,盘区内按照先上分层,后下分层,在分层平面内,按照先里后外、先难后易、先中间后两端的间隔式矩形进路回采顺序进行回采,且盘区内相邻上下两分层的回采矩形进路采用垂直交叉布置;该采矿工艺易于管理、易于操作和推广、采矿安全高效、资源回采率高、贫化率低。
 1041
0
1041
0
一种矿山开采嗣后胶结和非胶结充填采矿方法,包括:(1)矿房准备:(2)矿房充填准备:(3)充填准备:将尾矿、水泥、超微粉和采矿废石制成的骨料制备成大于70%浓度的充填料桨通过管道加压或者自流到准备好的采空矿房进行胶结充填,非胶结充填则只用浓密为65%以上的高浓度尾矿和小于2cm的颗粒采矿废石直接充填于采空矿房;(4)回采与矿房充填:每隔四个矿房,对开采相邻的下一个矿房回采与充填,相邻矿房间采用胶结和非胶结充填的方式交错进行;(5)充填后的管理:本发明的经济和社会效益显著,适用于充填采矿法采矿,尤其适用于中低品位的磷矿山。
 985
0
985
0
本发明公开了一种采矿中深孔凿岩爆破方法,涉及地下采矿技术领域,在分段平面回采进路内采用风动或液压凿岩设备施工采矿中深孔后进行装药爆破,采矿中深孔整体以扇形或平行方式布置,并采取两种以上不同直径交错或束状布置;根据不同的布置形式进行装药爆破,大直径炮孔先起爆,小直径炮孔后起爆。其中小直径炮孔凿岩效率较高、装药量较少、爆破产生的有害气体较少,在不影响爆破效果的情况下可降低凿岩爆破费用,因而有利于提高采矿效率、降低采矿成本;不同直径的炮孔采用不同段别的雷管起爆,大直径炮孔起主爆作用先起爆、小直径炮孔起辅爆作用后起爆,有利于降低爆破冲击波和地震波。
 870
0
870
0
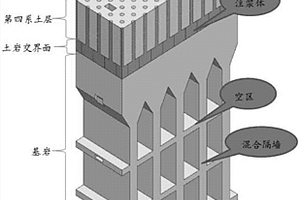
本发明公开了一种与地下仓库建设相结合的采矿方法,采用空场法或人工混合隔墙式采矿法进行采矿;采矿结束后,对采空区进行防渗漏处理,再进行功能性装修,作为地下仓库。本发明因前期在支护与防水防渗方面的高等级处理,使得采矿活动的安全性与高效性得到保证。同时,与单纯的地下粮食库建设相比,因不需要摊入前期地下巷道的开拓与硐室开掘费用,地下仓库的建造费用相对于其收益来说,可以忽略不计,同时,安全性与环保要求很容易得到满足,维护费用极低。本发明还公开了一种空区仓库的通风降温系统。能够对存满粮食的空区仓库进行高效率的通风降温。
 853
0
853
0
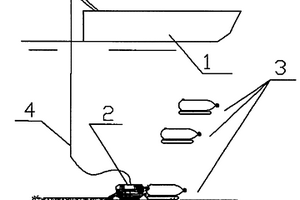
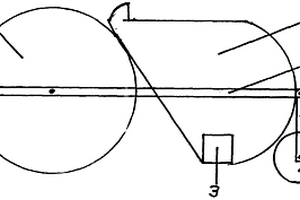
一种水下工程技术领域的分散式深海局部试采矿系统。本发明包括:水面母船、采矿潜水器和提升系统,提升系统由多个提升潜水器组成,提升潜水器为无人无缆潜水器,采矿潜水器为无人有缆潜水器,通过脐带缆和母船相连,脐带缆中有电力和信息传送通道,提升潜水器、采矿潜水器和水面母船通过水声通信和定位,作业时,采矿潜水器在海底运动采矿,提升潜水器穿梭于采矿潜水器和母船之间输送采集的矿样,满载的提升潜水器由采矿潜水器处被引导向母船运动,空载的提升潜水器由母船处被引导向采矿潜水器附近运动。本发明灵活、成本低、实用性强,可有效支持深海多金属结核、富钴结壳和金属硫化物矿床等多种深海矿产资源的局部试开采。
 1229
0
1229
0
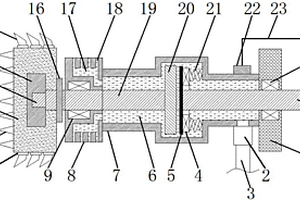
本发明公开了一种电磁制动式高效除尘降温的采矿钻具,包括进水管套、喷水罩、采矿钻头、采矿钻杆和制动盘,所述进水管套前端焊接有喷水罩,所述进水管套后端焊接有端封盘,所述端封盘、进水管套和喷水罩之间围成进水腔;所述进水腔内穿设有采矿钻杆,所述采矿钻杆与喷水罩之间设有密封圈,采矿钻杆前端穿出喷水罩焊接有限位销,限位销插入到导热盘中部的插槽内,所述导热盘镶嵌在采矿钻头内部;所述采矿钻头前端设有若干切割齿,采矿钻头侧面通过焊接块焊接有若干剪切齿;实现对采矿钻头内部和外部的同步降温处理,降温效果好;制动效果好,进水腔内水流对制动产生的热量及时散发,降温效果好,解决了现有的制动发热、发烫严重的问题。
 1023
0
1023
0
一种采矿工程教具模型,属于采矿工程教学与培训领域。其特征在于是一种在原有大型整体采矿工程模型的基础上,根据采矿工程的工程特征及模型组合特点,进行合理拆分和组合,将各工程拆分成基本工程块和辅助块,每个基本工程块均代表着不同的采矿工程,辅助块包括连接块、支撑块和通风设施块。基本工程块通过连接块连接成复杂工程,通过支撑块形成三维空间模型,通过通风设施块构成完整的矿井通风系统。采矿工程课堂教学和模型课教学中配合使用采矿工程教具模型,便于采矿工程空间形态与二维工程图形结合,提高授课效果。同时,学生课后使用采矿工程教具模型可以深化采矿工程空间概念,提高二维工程图形的读图能力和空间想像能力。
 1020
0
1020
0
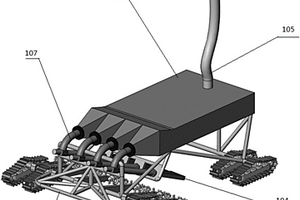
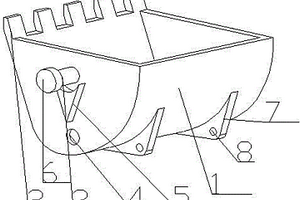
本发明公开了一种海底富钴结壳采矿车,包括底座、行走装置、采矿头、集矿头和收集装置,底座固定于行走装置上,采矿头固定于支架上并接触地面以进行富钴结壳破碎,集矿头固定于底座上并沿采矿车前进方向设于采矿头之后,收集装置固定于底座上且连接集矿头并为集矿头提供负压以吸取采矿头破碎富钴结壳后产生的富钴结壳矿浆,本发明的技术效果在于,采矿车在行走作业过程中,履带能自适应富钴结壳矿区复杂多变地形;在采集作业工作中通过液压油缸控制机械臂的上下移动来调节切削破碎采矿头的离地工作高度,以尽量减少甚至不切削基岩,达到破碎尽可能多富钴结壳的目的,降低贫化率。
 976
0
976
0
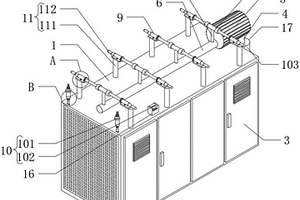
本实用新型公开了一种可对采矿区进行降尘的矿山机电设备,包括矿山机电设备本体、水箱和防护门,所述水箱位于矿山机电设备本体的内部,所述防护门通过合页活动安装在矿山机电设备本体的正面,所述水箱的顶部连通有连接管。本实用新型通过设置自动检测机构,使自动检测机构能够对采矿区进行实时检测,然后通过超声波喷头对采矿区进行降尘,从而达到了对采矿区自动检测进行降尘的效果,解决了在对采矿区进行降尘时依旧采用传统的一个大喷头对采矿区进行降尘,且不具备自动检测进行降尘的结构,不仅降尘效率差,且还会浪费一些水源,难以保证降尘效率的问题,达到了对采矿区自动检测进行降尘的效果。
 992
0
992
0
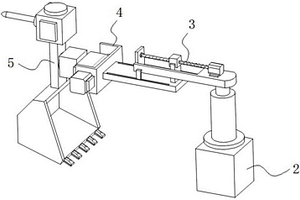
本实用新型公开了一种用于萤石矿的振动式露天采矿机,包括机架,机架的顶部的一侧设置有驱动组件,驱动组件的驱动端设置有移动组件,移动组件的移动端设置有旋转组件,旋转组件的旋转端设置有采矿组件,其中采矿组件包括控制箱,控制箱的一侧转动连接有支架,支架的顶部固定连接有破碎机,破碎机上设置有振动器,支架的底部固定连接有采矿铲。本实用新型通过旋转组件和采矿组件的组合,不仅提高了采矿效果,而且角度调节的功能,并且通过破碎机的设置,可以对大型块状的萤石块进行破碎,便于提高后续采矿铲的刮取,具有良好的转换功能,有效的解决了萤石块体型过大,不便于采集,以至于需要额外的破碎机进行破碎的问题。
 1033
0
1033
0
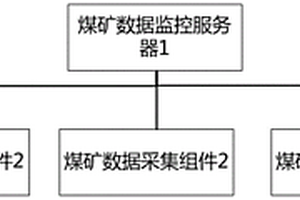
本发明提供一种采矿过程数据监控系统,每个煤矿数据采集组件与煤矿数据监控服务器通信连接;煤矿数据采集组件检测采矿过程数据信息,并将采矿过程数据信息上传至煤矿数据监控服务器;煤矿数据监控服务器将采矿过程数据信息与预设阈值进行比对,判断是否超阈值,如超阈值则进行报警;通过与煤矿数据采集组件数据通信获取到采矿过程数据信息,实现采矿过程数据信息的传输、采矿过程数据信息处理分析,根据预设规则发出预警,并根据采矿过程数据信息分析结果反馈控制指令实现自动控制,能够自动监测采矿过程数据信息,实现根据不同工况采矿状态下的实时监控,保证采矿作业安全,如遇到问题能够快速处理。
 1422
0
1422
0
本发明是一种倾斜中厚金属矿体高效采矿方法,采矿步骤是:第一步:施工脉外运输巷,第二步:施工分段凿岩平巷,第三步:施工切割巷,第四步:施工切割井,第五步:施工切割槽并预留临时三角矿柱,第六步:施工堑沟,第七步:施工扇形中深孔、实施爆破及出矿:第八步:回收余矿。本发明针对倾角30~55°,矿体平均厚度4~15m的金属矿体,在不具备充填条件的情况下,采用了中深孔爆破落矿阀,安全高效回采,进一步提高了采矿回收率和采矿效率。
 949
0
949
0
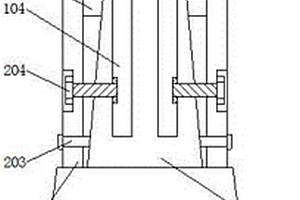
本实用新型公开了一种采矿工程用安装稳定抗应力效果好的钻头,包括主体机构与安装加强机构,安装加强机构的数量为四个且等距离环绕设置在主体机构上;主体机构包括工作头部,工作头部的顶部固定连接有插接块,插接块的上方设置有安装柱,安装柱底部的左右两侧均固定连接有定位杆,定位杆的底端贯穿安装柱且延伸至其内部与其活动连接。本实用新型通过主体机构和安装加强机构的相互配合,实现了一种采矿工程用安装稳定抗应力效果好的钻头,大大提升了采矿工程用钻头安装的稳定性,安装牢固,并且,在安装完成之后,也大大提升了采矿工程用钻头的抗应力效果,有效避免钻头与安装处机件发生弯折或错位,方便使用,有利于采矿工程的进行。
 1132
0
1132
0
本实用新型公开了一种具有粉碎功能的采矿机,包括壳体、进料口、支板、支杆、旋转电机、采矿轮、活动组件、粉碎电机、转轴、粉碎辊和出料口,所述进料口设于壳体上端,所述支板设于壳体上,所述支杆的一端固定设于支板侧壁,所述旋转电机设于支杆的另一端,所述采矿轮设于旋转电机输出轴端,所述活动组件设于壳体外侧壁,所述粉碎电机设于活动组件上,所述转轴贯穿壳体设于粉碎电机输出轴端,所述粉碎辊设于转轴上,所述粉碎电机、转轴和粉碎辊分别设有两组,两组所述粉碎辊转动方向呈相反设置,所述出料口设于壳体下端,本实用新型属于采矿机械技术领域,具体是指一种具有粉碎功能的采矿机。
 813
0
813
0
一种用于采矿顶板的支撑系统。本产品其组成包括:顶板,所述的顶板贴在采矿坑道的顶部,所述的顶板连接一组横向排列的横托条,所述的横托条之间通过竖托条连接,所述的横托条与所述的竖托条之间十字交叉设置,所述的横托条与所述的竖托条之间连接有对角线托条,所述的横托条的左侧底部设置左固定条,所述的左固定条托住所述的横托条,所述的左固定条固定在采矿坑道的顶部左侧,所述的横托条的右侧底部设置右固定条,所述的右固定条托住所述的横托条,所述的右固定条固定在采矿坑道的顶部右侧,其中一组所述的横托条与所述的竖托条的十字交叉处的底部设置托板,所述的托板连接调节支撑部分。本实用新型用于支撑采矿顶板。
 859
0
859
0
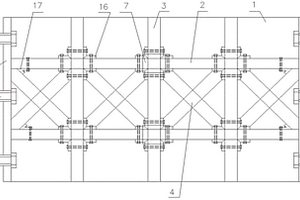
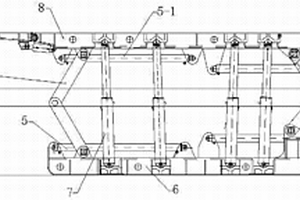
本发明公开了采矿工作面挡矸切顶挂模沿空留巷液压支架,包括底座、设在底座上的液压支柱、与液压支柱相连的顶梁,采矿工作面挡矸切顶挂模沿空留巷液压支架由四排窄体液压支架并排排列连接组合而成,采空区至沿空留巷方向依次为第一排、第二排、第三排与第四排,每排窄体支架设有前侧护板、尾部挡矸板及一个四连杆和一个单连杆,第一排与第三排设有侧部挡矸板,第四排一侧设有挂模机构,第一排与第二排之间、第三排与第四排之间分别通过底部和顶部斜推拉千斤顶连接。实现了采空区挡矸、支护、切顶、纠偏自移与挂模的机械化,保证了作业人员安全,适合日推采15m左右的快速沿空留巷,不影响生产,为沿空留巷浇筑混凝土连续墙提供作业空间。
 931
0
931
0
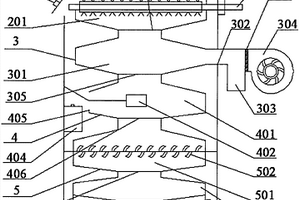
本实用新型公开了一种采矿工程垃圾的处理装置,包括腔体,腔体顶部设有垃圾入口,腔体底部设有处理物出口,在腔体内由上而下设置有塑料袋分选机构、轻质垃圾收纳机构、金属类垃圾分选机构、破碎机构和净化机构,塑料袋分选机构包括活动转轴和毛刺毡子,轻质垃圾收纳机构包括收纳箱和用于吸取轻质垃圾的抽风机,金属类垃圾分选机构包括磁铁板、刮板和收集盒,破碎机构内设旋转刀片,净化机构包括发酵室和过滤网。本实用新型所述的一种采矿工程垃圾的处理装置可有效地对采矿工程垃圾进行分类处理、实现采矿工程垃圾的减量化和资源化利用,保证处理后的采矿工程垃圾在进行回收利用时不会产生有危害的物质。
 1458
0
1458
0
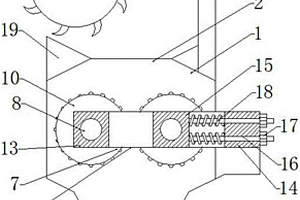
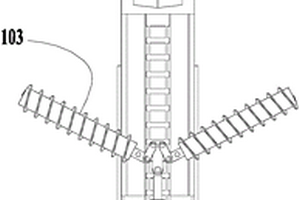
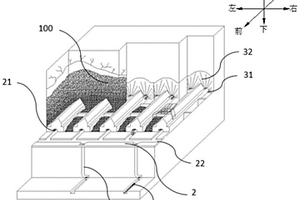
本实用新型涉及采矿机械领域,具体而言,涉及无人智能采矿机及安装有侧翼截割装置的机械设备。无人智能采矿机,包括截割部、位于截割部上的动力装置和侧翼截割装置;侧翼截割装置收拢在截割部内,且可在动力装置的驱动下向截割部的两侧展开至与截割部的长度方向呈一定夹角的位置,用于截割截割部两侧的矿体。侧翼截割装置展开后与截割部的长度方向呈一定夹角,则截割部回退过程中,侧翼截割滚筒同时能截割两侧的矿体,使巷道两侧形成持续落矿物的冒落面,增加无人智能采矿机的采矿量。
 874
0
874
0
本发明公开了一种海底厚大金属矿护顶下中腰双向式充填采矿法,其特征在于:在矿体与海底之间预留安全隔离层;在垂高方向上从中腰将矿体分为上下二部分;所述中腰位置距海底海泥的垂高为100~150m;从矿体中腰位置开始回采,其上部采用上行式开采,下部采用下行式开采;所述的上行式开采采用留规则点柱的脉外无轨采准上向分层胶结充填法;所述的下行式开采采用脉外无轨采准普通分层充填采矿法,采场用充填料填实采空区。本发明具有开采安全性高,资源损失小,机械化程度高,劳动强度低,生产能力大,回采时间短,开采沉降低等显著特点。
 1055
0
1055
0
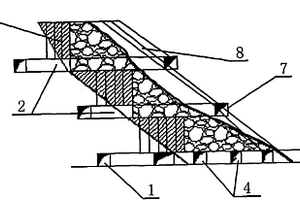
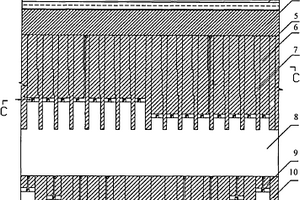
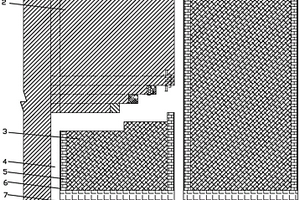
本发明公开了一种缓倾斜薄层状玉石矿机械预切缝爆破采矿方法,具体是:沿矿体走向布置采场,先采矿柱后采矿房,以本阶段运输巷道(8)和运输上山巷道(9)为初始自由面进行矿柱回采,待矿柱回采完成后采用钢筋混凝土形成人工矿柱,其为钢筋混凝土支柱(7),代替矿柱;矿房内沿矿体走向和倾向向两侧推进回采,后方进行跟随式充填;采用预切缝爆破的方法开采,矿房底板预留保护层并用锯切机械切预切缝(15),预切缝与矿体之间的岩层为保护层(14),对保护层上部围岩采用微差爆破;人工或机械劈裂剥离保护层,手推式切割机切割矿体出矿。本发明具有高效生产、回采率高达95%和减少了运输和处理废石的费用等优点。
 1302
0
1302
0
本发明涉及一种钢筋混凝土柔性假顶矿废隔离的崩落采矿法,本发明以有底柱阶段自然崩落采矿法为例,包括在矿块顶部切顶然后全面连续铺设钢筋混凝土柔性假顶,用于隔离废石覆盖层与崩落矿石,矿石是在钢筋混凝土柔性假顶的保护下进行放出,有效阻止废石在放矿过程中混入矿石,其他采矿工艺与原采矿方法相同。所述钢筋混凝土柔性假顶特征在于具有“局部刚性,整体柔性”的变形特性。
 921
0
921
0
本发明公开了一种自然崩落采矿法,所述自然崩落采矿方法是对多条矿脉和相邻所述矿脉之间的夹石进行整体开采,所述自然崩落采矿方法包括:在矿脉的底部形成运输水平,运输水平包括运输巷道;在运输水平的上方形成出矿水平,出矿水平包括多条出矿巷道和多条装矿巷道,装矿巷道内设有放矿点;在出矿水平的上方对矿脉和夹石进行拉底,以形成拉底水平,拉底水平与装矿巷道之间形成聚矿槽;对拉底水平上方的矿脉和夹石进行自然崩落,崩落后的矿石通过聚矿槽进入装矿巷道中;将矿石输送至放矿点;对放矿点的矿石进行品位检测,将低品位矿石和高品位矿石分离分运。本发明的自然崩落采矿法可以对薄矿脉进行开采,开采成本低、开采效率和安全性高。
 1024
0
1024
0
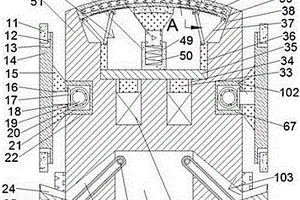
本发明公开了一种可防止矿洞坍塌的矿洞壁采矿车,包括采矿车,所述采矿车内设有开口向上的存放腔,所述存放腔内设有可用于支撑矿洞顶壁的软板,所述采矿车的左右壁之间上下滑动设有升降板,所述采矿车内设有可通过所述升降板的升降来控制所述软板抵接压紧矿洞顶壁,并可贴合适应弧形顶壁的支撑机构,所述采矿车的左右两侧均设有开口向两侧所述滑动腔,本发明可有效降低在凿挖矿洞矿壁时由于凿挖振动导致矿洞坍塌的风险,让矿石的凿挖过程更加的安全,并且自动化和稳定性程度更高,其中,支撑机构能够通过升降板的升降来控制软板极大面积的贴合矿洞顶壁。
 1207
0
1207
0
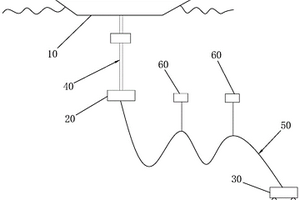
本发明提出了一种海洋采矿系统,涉及海洋采矿设备技术领域,该海洋采矿系统包括:水上平台、中继舱、海底采矿机、硬管、矿物输送软管、至少两个稳定装置;其中,中继舱可用于产生第一信号;海底采矿机可用于产生第二信号;硬管用于连接水上平台和中继舱以将矿物从中继舱输送到水上平台;矿物输送软管用于连接中继舱和海底采矿机以将海底采矿机所采集的矿物输送到中继舱中;该稳定装置能够根据第一信号确定中继舱的位置,根据第二信号确定海底采矿机的位置,根据中继舱的位置和海底采矿机的位置来调节自身位置,使矿物输送软管保持预设的空间形态。该海洋采矿系统提高了中继舱与海底采矿机之间矿物输送软管的稳定性。
 1162
0
1162
0
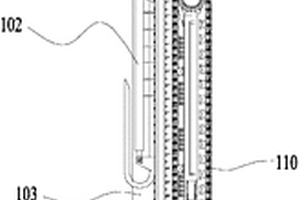
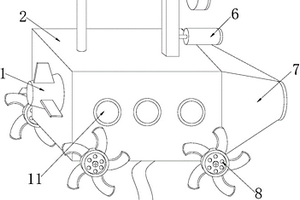
本实用新型公开了一种水下空间采矿装置,其结构包括尾部螺旋桨、水下采矿机、遥控器信号接收杆、连接支架、水下探照灯、防水摄像头、螺旋桨动力头、水平推进螺旋桨、矿石输送座、矿石输送管、活动门、遥控器,遥控器信号接收杆与遥控器通过无线电连接,遥控器信号接收杆连接于水下采矿机上端表面的一侧,水下采矿机上端表面的另一侧焊接有连接支架,连接支架上端表面的另一侧分别连接有水下探照灯、防水摄像头,本实用新型通过上述部件的互相组合,实现了设备能够在采矿前快速进行固定,避免设备在采矿过程中晃动导致设备的工作效率下降,同时设备采用远程操控的方式控制设备运转,提高了设备的工作安全性,设备的自动化程度高,实用性强。
中冶有色为您提供最新的有色金属采矿技术理论与应用信息,涵盖发明专利、权利要求、说明书、技术领域、背景技术、实用新型内容及具体实施方式等有色技术内容。打造最具专业性的有色金属技术理论与应用平台!


 2025年09月25日 ~ 27日
2025年09月25日 ~ 27日  2025年09月25日 ~ 27日
2025年09月25日 ~ 27日  2025年09月26日 ~ 28日
2025年09月26日 ~ 28日  2025年10月15日 ~ 17日
2025年10月15日 ~ 17日  2025年10月24日 ~ 26日
2025年10月24日 ~ 26日 










































































