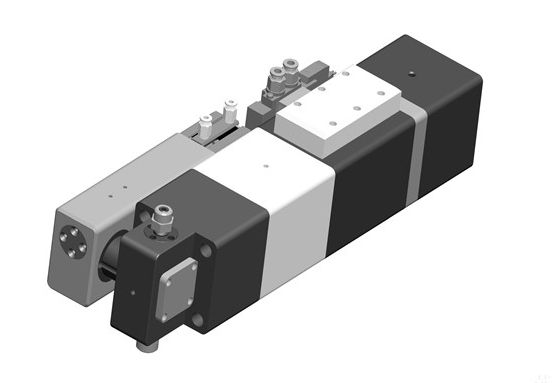
本实用新型涉及充电式高精度智能轨道扣件螺栓扳手,其动力系统安置在车架(9)上,通过锂电池组(6)向直流电机(3)输送驱动力;车架(9)上还设有控制系统,包括两组平行四连杆机构(5),分别引导左右两组螺栓套筒(11)垂直升降;螺栓套筒和减速机之间串接有扭矩传感器(12),扭矩传感器(12)连接于扭矩控制电路,将螺栓套筒(11)的扭矩状态传递给扭矩控制电路,进而对直流电机(3)的扭矩输出状态进行控制;两组套筒总成可以单独工作也可同时工作,相互无直接影响;还具有滚轮夹钳机构(10)将车架(9)环抱在钢轨(13)的轨头上,使整个扳手既可沿钢轨(13)轻便滚动运行,又不会发生倾倒。
声明:
“充电式高精度智能轨道扣件螺栓扳手” 该技术专利(论文)所有权利归属于技术(论文)所有人。仅供学习研究,如用于商业用途,请联系该技术所有人。
我是此专利(论文)的发明人(作者)
 882
编辑:管理员
来源:中冶有色网
882
编辑:管理员
来源:中冶有色网



 咨询细节
咨询细节













































































 2025年10月17日 ~ 19日
2025年10月17日 ~ 19日 









