1.本发明涉及随钻测量技术领域,特别涉及一种用于随钻测量的井下陀螺测量方法。
背景技术:
2.随钻测量mwd是指钻机在钻进的同时连续不断地检测有关钻孔或钻头的信息,靠跟踪与导向仪实现.因此,跟踪与导向仪是水平定向钻机施工的必备测量设备.随钻测井lwd是在mwd的基础上,增加若干用于地层评价的参数
传感器,如补偿双侧向电阻率、自然伽马、方位中子密度、声波、补偿中子密度等发展起来的,陀螺定向测量是用陀螺经纬仪测定某控制网边的陀螺方位角,并经换算获得此边真方位角的测量工作,常用于定向连接测量。陀螺方位角,是从陀螺仪子午线(测站上通过假想的陀螺轴稳定位置的子午面,即陀螺仪子午面与地平面的交线)北方向顺时针量至某定向边的水平角,确定测站真子午线北方向的常用方向有:中天法,是通过对陀螺仪轴运转的观测,先确定近似北方向,在连续读记摆动的指标线(陀螺轴)反复经过分划线板零线时的时间,和到达东、西逆转点时的水平度盘读数,经计算获得近似北方向的改正数,进而确定测站真北方向;逆转点法,是用陀螺经纬仪跟踪观测摆动的指标线(陀螺轴)反复到达东、西逆转点时的水平度盘读数,经计算确定测站真北方向。
3.现有技术中,通过测量油井的井身结构来测绘出油井的井眼轨迹,井身测点的位置可以由井深、井斜角和方位角三个参数唯一确定,传统的采用磁性定向仪器的方法,由于受到套管磁场的影响而无法实现对其测量,导致测量结果受干扰,导致测量出现误差;因此,我们提出一种用于随钻测量的井下陀螺测量方法。
技术实现要素:
4.本发明所要解决的技术问题是提供一种用于随钻测量的井下陀螺测量方法,有效的克服了现有技术的缺陷。
5.本发明解决上述技术问题的技术方案如下:
6.一种用于随钻测量的井下陀螺测量方法,包括以下步骤:
7.步骤一、对底部钻具组合进行导向,控制所述底部钻具组合的随机运动,具体的,通过控制器控制偏置作用在底部钻具组合上的侧向力;
8.步骤二、根据地质条件和储层位置,设计目标井眼轨迹;
9.步骤三、根据目标井眼轨迹得到钻进的轨迹参数,其中,轨迹参数包括井深、井斜角、方位角的目标值和允许变化率范围值;
10.步骤四、将陀螺仪安装在钻柱内,同时建立陀螺仪与控制器之间的信号通讯;
11.步骤五、井下钻进,并在钻进过程中连续采集底部钻具中钻柱在三个方向上的实时姿态测量值,其中,实时姿态测量值包括井深、井斜角、方位角的测量值;
12.步骤六、采用卡尔曼滤波融合算法以及递归算法,通过钻柱上一时刻的估计值和
当前时间的测量值计算当前钻柱的实时姿态估计值;
13.步骤七、根据实时姿态估计值与设计的轨迹参数进行对比,调整钻进方向;
14.步骤八、反复多次按照步骤六至步骤八的方法继续钻进,直至到达目的层或点。
15.在上述技术方案的基础上,本发明还可以做如下改进。
16.进一步,所述底部钻具组合包括偏置机构、方向传感器、控制器、电源模块和无线通信模块,所述陀螺仪采用无线三轴组合式陀螺仪,其z轴与钻柱的轴线重合,并且,步骤一中,控制器控制偏置机构的运行,从而控制偏置作用在底部钻具组合上的侧向力。
17.进一步,所述井深为井口至测点之间的井眼实际长度,所述井斜角为测点处的井眼方向线与重力线之间的夹角。
18.进一步,所述方位角为以正北方向线为始边,顺时针旋转至方位线所转过的角度,该方向线在水平面上,所述方位角为0-360
°
。
19.进一步,所述陀螺仪通过无线通信模块与控制器通信连接。
20.进一步,所述控制器为plc控制器。
21.进一步,所述步骤七中涉及的算法包括:
22.xk=akxk-1+bkuk-1+wk-1
???????????
(1)
23.zk=hkxx+vk
?????????????????????
(2)
24.其中,公式(1)中,xk表示k时刻的状态变量,zk是k时刻的观测序列,wk-1、vk分别是过程噪声和观测噪声,ak是k时刻n*n阶的增益矩阵用于转换k-1时刻的状态变量,uk-1是k-1时刻的可控向量,bk是k时刻n*1阶的增益矩阵用于调节可控向量uk-1,公式(2)中,hk是k时刻m*n阶的增益矩阵,表示k时刻的状态对测量值的增益。
25.本发明的有益效果是:通过底部钻具组合和陀螺仪结构,陀螺仪通过无线通信模块与控制器通信连接,对钻柱的实时姿态进行监测,同时采用卡尔曼滤波融合算法,采用递归算法,通过钻柱上一时刻的估计值和当前时间的测量值计算当前钻柱实时姿态估计值,以此来获取实时的偏差值,减少其测量误差,并根据测量的偏差值调节钻柱的钻进方向,提高其精确性。
附图说明
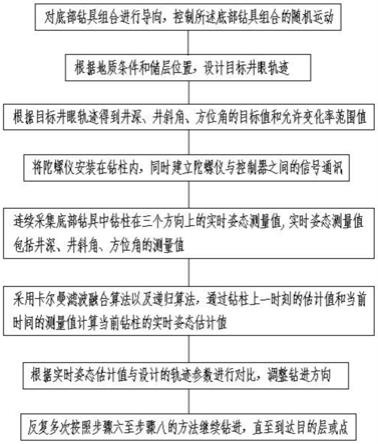
26.图1为本发明的用于随钻测量的井下陀螺测量方法的流程图。
具体实施方式
27.以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
28.实施例:如图1所示,本实施例的用于随钻测量的井下陀螺测量方法,其特征在于,包括以下步骤:
29.步骤一、对底部钻具组合进行导向,控制所述底部钻具组合的随机运动,具体的,通过控制器控制偏置作用在底部钻具组合上的侧向力;
30.步骤二、根据地质条件和储层位置,设计目标井眼轨迹;
31.步骤三、根据目标井眼轨迹得到钻进的轨迹参数,其中,轨迹参数包括井深、井斜角、方位角的目标值和允许变化率范围值;
32.步骤四、将陀螺仪安装在钻柱内,同时建立陀螺仪与控制器之间的信号通讯;
33.步骤五、井下钻进,并在钻进过程中连续采集底部钻具中钻柱在三个方向上的实时姿态测量值,其中,实时姿态测量值包括井深、井斜角、方位角的测量值;
34.步骤六、采用卡尔曼滤波融合算法以及递归算法,通过钻柱上一时刻的估计值和当前时间的测量值计算当前钻柱的实时姿态估计值;
35.步骤七、根据实时姿态估计值与设计的轨迹参数进行对比,调整钻进方向;
36.步骤八、反复多次按照步骤六至步骤八的方法继续钻进,直至到达目的层或点。
37.其中,底部钻具组合(现有技术)包括偏置机构、方向传感器、控制器、电源模块和无线通信模块,陀螺仪采用无线三轴组合式陀螺仪,其z轴与钻柱的轴线重合,偏置机构强调钻头相对于地球沿钻头的预定方向的径向运动的分量。
38.其中,方向传感器用于确定钻头在井下的方向,控制器用于比较预定方向与方向,其中,当方向偏离预定方向或预定方向的范围时,起动偏置机构,陀螺仪通过无线通信模块与控制器通信连接。
39.本实施例中,控制器采用现有技术的plc控制器,具体地,该plc控制器是指可编程逻辑控制器,一种具有微处理机的数字电子设备,用于自动化控制的数字逻辑控制器,可以将控制指令随时加载内存内储存与执行,可编程控制器由内部cpu,指令及资料内存、输入输出单元、电源模组、数字模拟等单元所模组化组合成,广泛应用于工业控制领域。
40.其中,井深指井口至测点间的井眼实际长度,井斜角指测点处的井眼方向线与重力线之间的夹角。
41.其中,方位角指以正北方向线为始边,顺时针旋转至方位线所转过的角度,该方向线是指在水平面上,方位角可在0—360
°
之间变化。
42.其中,plc控制器指可编程逻辑控制器,一种具有微处理机的数字电子设备,用于自动化控制的数字逻辑控制器,可以将控制指令随时加载内存内储存与执行,可编程控制器由内部cpu,指令及资料内存、输入输出单元、电源模组、数字模拟等单元所模组化组合成,广泛应用于工业控制领域。
43.其中,步骤六的算法为:
44.xk=akxk-1+bkuk-1+wk-1
45.zk=hkxx+vk
46.其中,xk表示k时刻的状态变量,zk是k时刻的观测序列,wk-1、vk分别是过程噪声和观测噪声,ak是k时刻n*n阶的增益矩阵用于转换k-1时刻的状态变量,uk-1是k-1时刻的可控向量,bk是k时刻n*1阶的增益矩阵用于调节可控向量uk-1,hk是k时刻m*n阶的增益矩阵表示k时刻的状态对测量值的增益。
47.本实施例中,通过底部钻具组合和陀螺仪结构,陀螺仪通过无线通信模块与地面控制器通信连接,对钻柱的实时姿态进行监测,同时采用卡尔曼滤波融合算法,采用递归算法,通过钻柱上一时刻的估计值和当前时间的测量值计算当前钻柱实时姿态估计值,以此来获取实时的偏差值,减少其测量误差,并根据测量的偏差值调节钻柱的钻进方向,提高其精确性。
48.本实施例中,需要补充说明的是:底部钻具组合还包括随钻测井(lwd)模块、随钻测量(mwd)模块、旋转导向系统和马达、以及钻头,如本领域所公知的,lwd模块容纳在专用
钻铤中,并且可以包括一个或多个已知类型的测井仪,还要理解的是可以使用多于一个的lwd和/或mwd模块。lwd模块包括用于测量、处理、和存储信息的能力,以及用于与地面设备进行通信的能力,在本实施例中,lwd模块包括压力测量装置。如本领域所公知的,mwd模块也容纳在专用钻铤中,并且可以包括用于测量钻柱和钻头的特征的一个或多个装置。mwd测井仪还包括用于为井下系统生成电力的设备。这通常可以包括由钻井液的流动提供动力的泥浆涡轮发电机,且要理解的是可以使用其它电源和/或电池系统,在本实施例中,mwd模块包括以下类型测量装置中的一个或多个:钻压测量装置、扭矩测量装置、振动测量装置、冲击测量装置、粘滑测量装置、方向测量装置、和倾角测量装置。
49.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
50.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
51.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
52.在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
53.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
54.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。技术特征:
1.一种用于随钻测量的井下陀螺测量方法,其特征在于,包括以下步骤:步骤一、对底部钻具组合进行导向,控制所述底部钻具组合的随机运动,具体的,通过控制器控制偏置作用在底部钻具组合上的侧向力;步骤二、根据地质条件和储层位置,设计目标井眼轨迹;步骤三、根据目标井眼轨迹得到钻进的轨迹参数,其中,轨迹参数包括井深、井斜角、方位角的目标值和允许变化率范围值;步骤四、将陀螺仪安装在钻柱内,同时建立陀螺仪与控制器之间的信号通讯;步骤五、井下钻进,并在钻进过程中连续采集底部钻具中钻柱在三个方向上的实时姿态测量值,其中,实时姿态测量值包括井深、井斜角、方位角的测量值;步骤六、采用卡尔曼滤波融合算法以及递归算法,通过钻柱上一时刻的估计值和当前时间的测量值计算当前钻柱的实时姿态估计值;步骤七、根据实时姿态估计值与设计的轨迹参数进行对比,调整钻进方向;步骤八、反复多次按照步骤六至步骤八的方法继续钻进,直至到达目的层或点。2.根据权利要求1所述的一种用于随钻测量的井下陀螺测量方法,其特征在于:所述底部钻具组合包括偏置机构、方向传感器、控制器、电源模块和无线通信模块,所述陀螺仪采用无线三轴组合式陀螺仪,其z轴与钻柱的轴线重合,并且,步骤一中,控制器控制偏置机构的运行,从而控制偏置作用在底部钻具组合上的侧向力。3.根据权利要求1所述的一种用于随钻测量的井下陀螺测量方法,其特征在于:所述井深为井口至测点之间的井眼实际长度,所述井斜角为测点处的井眼方向线与重力线之间的夹角。4.根据权利要求3所述的一种用于随钻测量的井下陀螺测量方法,其特征在于:所述方位角为以正北方向线为始边,顺时针旋转至方位线所转过的角度,该方向线在水平面上,所述方位角为0-360
°
。5.根据权利要求1所述的一种用于随钻测量的井下陀螺测量方法,其特征在于:所述陀螺仪通过无线通信模块与控制器通信连接。6.根据权利要求1所述的一种用于随钻测量的井下陀螺测量方法,其特征在于:所述控制器为plc控制器。7.根据权利要求1至6任一项所述的一种用于随钻测量的井下陀螺测量方法,其特征在于,所述步骤七中涉及的算法包括:xk=akxk-1+bkuk-1+wk-1
?????
(1)zk=hkxx+vk
??????
(2)其中,公式(1)中,xk表示k时刻的状态变量,zk是k时刻的观测序列,wk-1、vk分别是过程噪声和观测噪声,ak是k时刻n*n阶的增益矩阵用于转换k-1时刻的状态变量,uk-1是k-1时刻的可控向量,bk是k时刻n*1阶的增益矩阵用于调节可控向量uk-1,公式(2)中,hk是k时刻m*n阶的增益矩阵,表示k时刻的状态对测量值的增益。
技术总结
本发明涉及一种用于随钻测量的井下陀螺测量方法,包括:对底部钻具组合进行导向,控制所述底部钻具组合的随机运动;设计目标井眼轨迹;根据目标井眼轨迹得到钻进的轨迹参数,轨迹参数包括井深、井斜角、方位角的目标值和允许变化率范围值;将陀螺仪安装在钻柱内,建立陀螺仪与控制器之间的信号通讯;在钻进过程中连续采集底部钻具中钻柱在三个方向上的实时姿态测量值,实时姿态测量值包括井深、井斜角、方位角的测量值;采用卡尔曼滤波融合算法以及递归算法,计算当前钻柱的实时姿态估计值;根据实时姿态估计值与设计的轨迹参数进行对比,调整钻进方向。优点:能够在钻进过程中获取实时的偏差值,减少其测量误差。减少其测量误差。减少其测量误差。
技术研发人员:张燕萍 曹川 罗勇 何坤 吴千里 侯福祥 王军 刘志同 卢静
受保护的技术使用者:中国石油集团工程技术研究院有限公司
技术研发日:2021.12.28
技术公布日:2022/4/8
声明:
“用于随钻测量的井下陀螺测量方法与流程” 该技术专利(论文)所有权利归属于技术(论文)所有人。仅供学习研究,如用于商业用途,请联系该技术所有人。
我是此专利(论文)的发明人(作者)
 1404
编辑:北方有色网
来源:中国石油集团工程技术研究院有限公司
1404
编辑:北方有色网
来源:中国石油集团工程技术研究院有限公司



 咨询细节
咨询细节














































































 2026年08月06日 ~ 08日
2026年08月06日 ~ 08日 




















