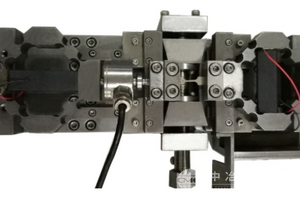
一种金属表面攀爬检测机器人,其机器人本体包括若干个关节模块、两个电磁吸附模块和若干个行走舵机,各模块依次按串联方式连接。T型关节模块的转轴互相平行,两端I型关节模块的转轴与之垂直,末端分别是电磁吸附模块。通过各关节的协调运动和电磁吸附模块的交替吸附,该机器人能在导磁金属表面上攀爬。其上有检测系统上的超声波传感器固定连接在一个电磁吸附模块边上,并采用总线方式与远程控制器连接。当机器人无超声波传感器的一端吸附固定时,超声波传感器在各关节模块的驱动下可沿金属表面移动进行无损探伤。本发明的机器人同时具有攀爬和检测功能,适用于替代人工在导磁性物体表面上工作,具有简单、实用、便捷和安全等优点。
声明:
“金属表面攀爬检测机器人” 该技术专利(论文)所有权利归属于技术(论文)所有人。仅供学习研究,如用于商业用途,请联系该技术所有人。
我是此专利(论文)的发明人(作者)
 922
编辑:管理员
来源:北方有色网
922
编辑:管理员
来源:北方有色网



 咨询细节
咨询细节












































































 2026年03月20日 ~ 22日
2026年03月20日 ~ 22日 









