全部
▼
热搜:
 960
960
 0
0
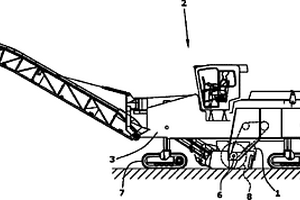
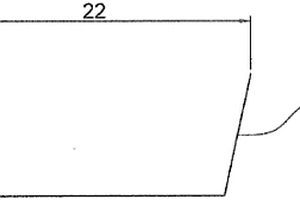
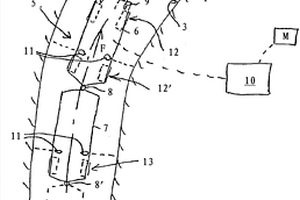
本实用新型涉及建设机械或采矿机械及其工作鼓的鼓外壳。用于建设机械(2)或采矿机械的工作鼓(8)的鼓外壳(1),所述工作鼓(8)具有刀具(4)并绕着鼓轴线(6)旋转,所述工作鼓还具有至少部分地包围该工作鼓(8)的圆周的外壳壳体(10),和设置在该外壳壳体(10)中的用于监测设备(14、16)的至少一个检查开口(18、20),其中所述监测设备(14、16)检查工作鼓(8)或其刀具(4)的状况,其可实现如下特征:闭合机构(22)设置在该外壳壳体(10)的外面上,所述闭合机构(22)能够闭合所述至少一个检查开口(18、20)。本实用新型可以在任何时候监测工作鼓的状态而无需任何安装努力,并允许工作鼓的检查中的时间经济性。
本发明涉及一种采矿方法,其包括形成一个或多个顺槽组的步骤。每个顺槽组包括典型地用于提供和返回通风的至少两个导洞。死端掏槽从顺槽组延伸。每个掏槽用联接到挠性传送机系统的连续采矿机形成。每个掏槽的长度大于30米。有利地,窄长形支柱可以留在相邻的掏槽之间,由此相比于房柱开采导致每体积更多的材料去除和改善的操作成本。
本申请涉及一种用于引导采矿机械的底盘沿齿条运动的系统,驱动系统和采矿机械。所述用于引导采矿机械的底盘沿齿条运动的系统包括滑靴和用于从流体源接收流体的流体管线。所述滑靴被构造成耦接至所述底盘并可滑动地啮合齿条。滑靴被构造成至少部分地围绕齿条延伸。所述滑靴包括:第一端、第二端、内表面和外表面。内表面的至少一部分被构造成位于齿条附近。流体管线包括出口,所述出口位于滑靴附近,以便将流体分配至滑靴与齿条之间的交界面上。
 800
0
800
0
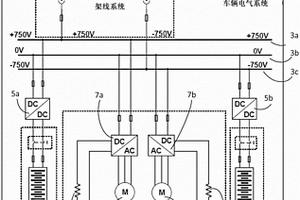
本发明涉及一种用于向采矿车辆供应电能的系统和方法以及一种采矿车辆。在所提出的解决方案中,使用包括具有一定的总电压的双极LVDC电源的系统将电能供应到采矿车辆。所述采矿车辆包括至少第一能量单元和第二能量单元。所述第一能量单元连接到所述一定的总电压的一部分,并且所述第二能量单元连接到所述一定的总电压的另一部分。
 775
0
775
0
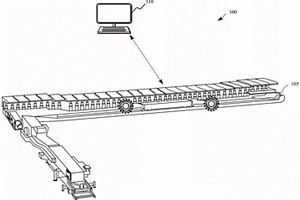
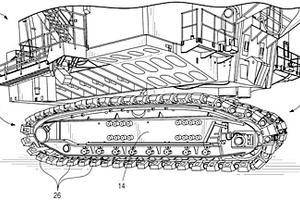
本实用新型涉及一种用于采矿系统的输送机,所述输送机包括:具有第一位置的第一链轮;具有第二位置的第二链轮,所述第一位置与第二位置间隔一定距离;与所述第一链轮和第二链轮连接的链条,所述链条具有顶链部分和底链部分;联接于所述第一链轮和第二链轮其中之一的驱动装置,所述驱动装置用于驱动所述第一链轮和第二链轮其中之一;传感器,所述传感器用于生成与所述驱动装置的特征相关的第一信号;测压元件,所述测压元件用于生成第二信号,所述第二信号与所述第一链轮和第二链轮其中之一的反作用力相关;液压缸;以及包括处理单元和存储器的控制器。本实用新型还涉及一种控制输送机链条张力的方法。
 786
0
786
0
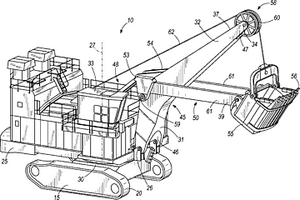
本实用新型涉及用于采矿挖掘机的挖掘组件和采矿挖掘机。本实用新型的采矿挖掘机包括挖掘组件,该挖掘组件具有V形的悬臂,该悬臂包括用于附接到采矿挖掘机的下连接点。悬臂的第一部分从下连接点向上延伸,并且悬臂的第二部分相对于第一部分成一角度并且从第一部分向上和向前延伸。该第二部分包括限定滑轮支撑件的远端,并且枢轴元件位于第一部分和第二部分之间的连接区域处。该挖掘组件还包括悬臂附接件,该悬臂附接件具有被枢轴元件以枢转方式支撑的第一端部和被滑轮支撑件支撑的第二端部。
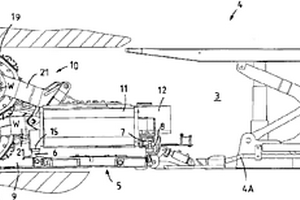
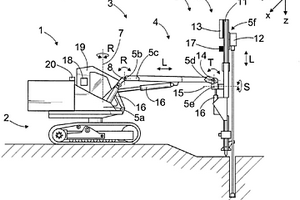
本发明涉及一种用于开采层式或大规模矿床的矿物材料的采矿机和采矿设备,它包括用于运走所开采的材料的输送装置,并包括可沿着输送装置(5)移动的采矿机(10),该采矿机包括配备有开采刀具(17)的至少一个滚筒(19),所述滚筒可绕滚筒轴线(W)转动并可通过旋转臂(21)相对于机架(11)调节高度。为了提供可实现高开采能力同时降低刀具磨损的采矿设备以及采矿机,本发明提出滚筒(19)的滚筒轴线(W)基本上平行于采矿机(10)的行进方向,开采刀具(17)成组地安装于刀架(18)上,刀架在滚筒(19)的外周分布以便可绕相对于滚筒轴线(W)横向的转动轴线旋转。
 1081
0
1081
0
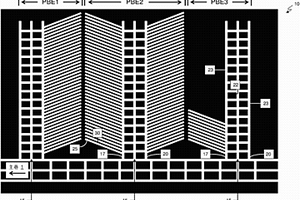
本发明涉及一种铣削机和用于露天挖掘采矿表面的采矿铣削材料的方法,在用于铣削露天挖掘采矿表面或用于铣削沥青或混凝土交通路面的脱离层的方法,具有移除地表面的铣削机,通过沿着具有预定长度的预定的铣削轨迹铣削地表面,通过经由传送设备将铣削的材料传送到至少一个卡车的容器,该卡车靠近铣削机行进,所述卡车每个装载具有预定的最大装载量,和通过当已经达到装载的最大装载量时用未装载的卡车替换完全装载的卡车其中:这样控制作为铣削机前进速度的函数的卡车的前进速度,使得至少一个容器的装载空间均匀地并完全地在长度上装载,直至最大装载量。
 752
0
752
0
一种长壁采矿系统,包括:铠面输送机;采掘机,沿铠面输送机在第一方向或第二方向上行进,包括采掘机壳体、在第一方向上远离采掘机壳体延伸并接合物料面的第一切割滚筒以及在第二方向上远离采掘机壳体延伸并接合物料面的的第二切割滚筒;第一相机,其生成与采掘机行进的第一方向相关的第一信号,安装在采掘机壳体上并面向第一方向;第二相机,其生成与采掘机行进的第二方向相关的第二信号,安装在采掘机壳体上并面向第二方向;以及控制器,包括非暂时性计算机可读介质和处理器,还包括存储在计算机可读介质中的计算机可执行指令以用于控制长壁采矿系统的操作,控制器耦接至第一相机以接收第一信号并耦接至第二相机以接收第二信号。
用在维护永久控制地表变形的开采矿床方法, 尤其在受影响范围内。应用废物料作为充填介质,使 得陷落采矿法能在需要保护地表的条件下使用。此 外,它对减少采矿成本和对自然环境保护的改善有 相当大的作用。它对矿床开采技术的进步和减少自 然环境的恶化将作出贡献。把采矿层的表面分成若 干分区,它的边近似等于下盘矿脉开采工作面的长 度。于是,为了把浆状杂质注入在岩体内已形成的裂 隙或离层,在由岩石的岩性和应力的水平分力的分 布所决定的垂直距离范围内,在该分区的对角线交 叉点处,打垂直孔或斜孔。
 742
0
742
0
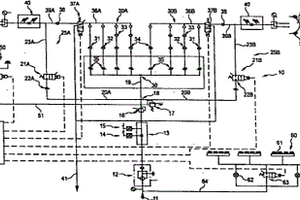
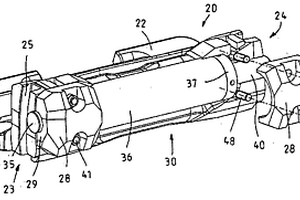
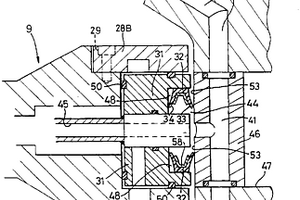
本发明涉及一种用于地下采矿的滚筒式采矿机,具有用于每个行驶方向的截割滚筒,具有一用于冷却驱动电机(31、32)的冷却水循环回路(30),具有一包括至少一个分别具有一个通向截割滚筒(4)的刀具的供应管道(23A、23B)的喷淋水循环回路(25A、25B)的喷淋系统,具有一用于水循环回路(10)的共同的水接头(11),以及具有与所述水循环回路(10)相配的用于接入或断开所述循环回路的多个阀。本发明设想,在冷却水循环回路的回流管道中分别设置一连接在供应管道上的开关阀(37A、37B),通过所述开关阀能够按需要将冷却水作为喷淋水供应给各截割滚筒。
 712
0
712
0
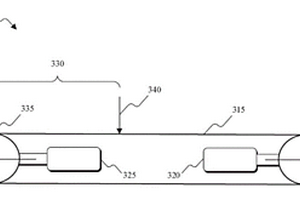
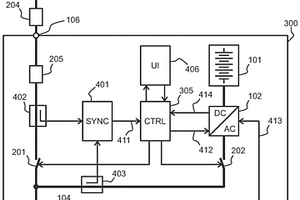
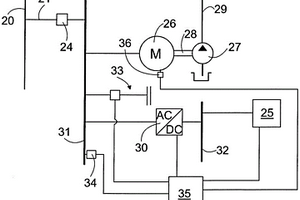
本发明涉及采矿车辆和用于启动采矿车辆的AC电动机的方法。为了启动采矿车辆(300)的AC电动机(104),首先利用由采矿车辆(300)的车载的用电池供电的逆变器(102)提供的第二AC电压将该AC电动机加速(501)到第一速度。将来自外部电网(203)的第一AC电压的相位与所述第二AC电压的相位进行比较。如果在第一和第二AC电压之间的相位差大于预定极限,则改变所述逆变器(102)旋转所述AC电动机(104)的速度。如果在所述第一和第二AC电压的所述相位之间的所述差小于所述预定极限,则作出从利用第二AC电压旋转AC电动机(104)到利用第一AC电压旋转AC电动机(104)的改变(504、505)。
 1129
0
1129
0
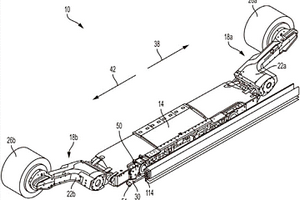
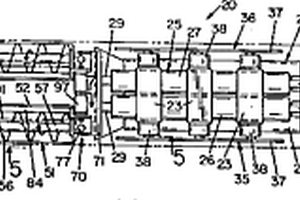
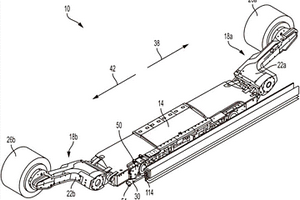
本文涉及一种采矿机、用于采矿机的框架的导轨及切割工具。所述采矿机包括具有导轨的框架,所述导轨具有中心部分。采矿机还包括履带板,所述履带板具有限定辊径的凹陷区域,所述履带板还具有驱动凸耳,其中导轨的中心部分被配置成设置在凹陷区域内。采矿机还包括切割工具,所述切割工具连接至框架并且被布置,使得所述切割工具被配置为当驱动凸耳经过切割工具时从驱动凸耳磨蚀性地去除材料。
 781
0
781
0
本发明涉及一种采矿车辆和移动采矿车辆的悬臂的方法。所述悬臂设有若干个悬臂接头且在所述悬臂的远端端部处存在采矿作业装置。一个或多个悬臂接头位置被确定且被存储在存储介质中。所述采矿车辆的控制单元可自动地将所述悬臂移动到预先确定的运输位置。
 1089
0
1089
0
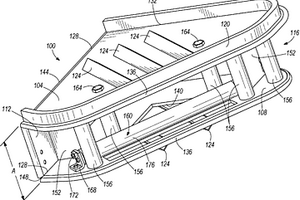
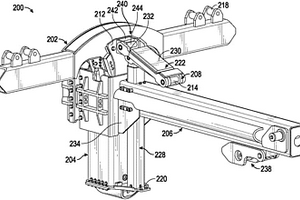
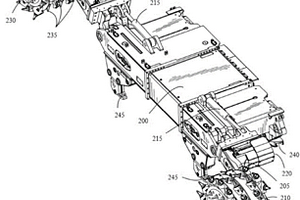
本实用新型涉及用于引导采矿车辆的拖曳线缆的滑轮支架和电动采矿车辆。电动采矿车辆包括框架,该框架滚动地支撑在表面上,用于在表面上移动。电动马达联接至该框架,用于向车辆提供动力。线缆电联接至电动马达,用于对其供电,并且线缆管理系统联接至框架,并且被布置成在车辆在表面上移动时接收和放出线缆。滑轮支架联接至框架,并且被布置成将线缆引导到线缆管理系统中,并且包括:大致水平地布置的下板;多个竖直辊,该多个竖直辊联接至下板并且被布置成将线缆引导到线缆管理系统中;以及水平辊,该水平辊联接至下板并且被布置成将线缆升高到下板的上方。
 717
0
717
0
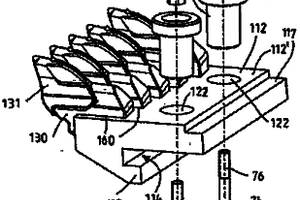
本发明涉及一种钻头装置,所述钻头装置用于紧固至用于地下采矿的采矿犁(50)的犁本体元件(55)上、特别是用于挖掘急倾斜设置的煤层的采煤犁的犁本体元件上,所述钻头装置具有多个钻头套(130),每个所述钻头套用于优选可拆卸地容纳一个钻头(131)。因此,为构建能够有利地用于挖掘急倾斜设置的矿物矿床并提供可能经济地挖掘这种矿物矿床的钻头装置和采矿犁,至少两个钻头套(130)锁定在钻头条带(111)的前侧上的凹槽(160)中,所述钻头条带在后侧上设有至少一个沟槽凹口(114)用于可靠接合犁本体元件上的锁定突起部并且能够借助于可拆卸的紧固装置(70)可拆卸地紧固至犁本体元件上。
 957
0
957
0
一种用于采矿顶板的支撑系统和地下采矿的锚杆机,所述支撑系统包括底座、缸、枢转机构、顶板支撑梁和支撑结构,缸联接到底座并且配置成可伸出和缩回,枢转机构联接到缸,顶板支撑梁联接到枢转机构并且配置成接触采矿顶板的表面,其中,当缸伸出时,顶板支撑梁和枢转机构相对于底座升高,并且当缸缩回时,顶板支撑梁和枢转机构相对于底座降低,支撑结构在第一端联接到底座并且在第二端联接到枢转机构,该支撑结构配置成限制顶板支撑梁绕缸设置的轴线的运动。
 1000
0
1000
0
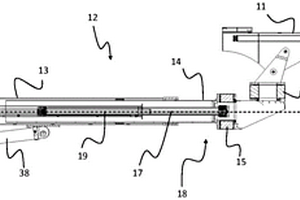
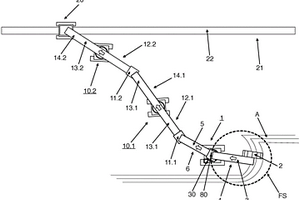
一种采矿或施工车辆(10),该采矿或施工车辆包括可延伸吊臂(12),该可延伸吊臂包括沿纵向方向(D1)延伸的第一伸缩部段(13)和第二伸缩部段(14),其中,第一伸缩部段(13)布置成连接至采矿或施工车辆(10),并且液压装置布置成连接至位于第二伸缩部段(14)的自由端部(18)处的安装装置(11),其中,液压缸(19)布置成连接至可延伸吊臂(12)以操控所述可延伸吊臂(12)的延伸。用于向安装装置(11)上的液压装置供应液压流体的液压管道(17)布置成穿过可延伸吊臂(12)的长度。
 771
0
771
0
本发明涉及采矿车辆和用于采矿车辆的能量供应的方法。采矿车辆包括至少一个采矿作业装置、用于对所述至少一个采矿作业装置提供动力的至少一个AC电动马达,以及辅助能量源。采矿车辆还包括用于供应无功电流和对辅助能量源充电或放电的功率电子装置。由功率电子装置供应的无功电流的量和用于对辅助能量源充电或放电的有效充电电流的量被控制,使得供电电缆的电流的最大值和功率电子装置的电流的最大值不被超过。
 908
0
908
0
本发明涉及一种用于井下的采矿刨机的牵引滑座(20),包括一可嵌入一在刨机体上的凹部中的牵引滑座体(21),其具有一前部(24),该前部的指向移动方向的各端构成止挡面(23),用以与刨机体的凹部中的相对止挡面相配合作用。为了改善牵引滑座(20)和刨机体的运行性能和相互作用,在牵引滑座(20)的前部(24)中结合一缓冲装置(30),该缓冲装置在两移动方向缓冲地与所属的、优选由可更换的垫板构成的在采矿刨机上的各相对止挡面相配合作用,本发明还涉及这种采矿刨机。
 808
0
808
0
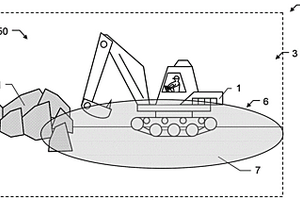
实时增强人对采矿工地上的采矿车的视野的方法和装置。本发明涉及一种向采矿工地(50)上的人(25)实时可视化(14)采矿车(1,1a)的风险区以用于增强该人对采矿车(1,1a)的当前视野(3)的方法。该方法包括步骤:利用相机(21)拍摄(11)采矿工地(50)的画面流(2),例如视频流,该相机的视场至少部分地与该人的视场对应;通过图像处理来识别(11)画面流中的至少一个采矿车(1,1a);从画面流提取(12)采矿车(1,1a)的图像数据(5);基于图像数据(5)和预设车辆风险区数据(8),计算(13)适应人对采矿车(1,1a)的当前视野(3)的采矿车(1,1a)的至少一个风险区(6,6e,6f);以及在人的显示器(25)上可视化(14)风险区(6,6e,6f),使得该人对采矿车(1,1a)的当前视野(3)实时地与风险区(6,6e,6f)的可视化(7,7e,7f)叠加。
 890
0
890
0
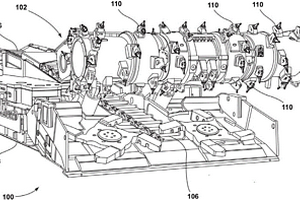
本发明涉及一种具有先导露天采矿系统(2,3,4)和跟随露天采矿系统(5至20)的露天采矿设备。所述先导露天采矿系统(2,3,4)能够在地面上在任何方向上移动。相对于所述先导露天采矿系统(2,3,4),所述跟随露天采矿系统(5至20)能够在地面上在至少一个方向上移动,并且将跟随所述先导露天采矿系统(2,3,4)的运动。数据处理闭环控制器(30)处理来自传感器的测量值,所述传感器测量所述跟随露天采矿系统(5至20)相对于所述先导露天采矿系统(2,3,4)的位置,并且控制所述跟随露天采矿系统(5至20)的操纵变量。所述受控的跟随露天采矿系统跟随所述先导露天采矿系统(2,3,4),实现开采材料的连续流动。
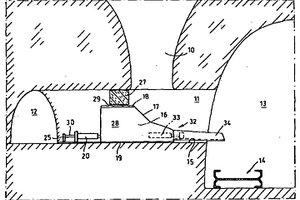
在用于在井下采矿操作的崩落采矿法中开采回采产物的装置中,回采产物通过一卸料漏斗(10)向下排入一卸料巷道(11)并且由其送给一在输送巷道中设置的卸料输送机,其中卸料巷道在输送巷道(13)与一平行架置的辅助巷道(12)之间横向延伸,在卸料巷道中设置一装料台,其构成一基本上横向于卸料输送机的输送方向定向的并向其倾斜的台面。为了可以控制通过卸料漏斗排出的回采物料量并且当已给卸料巷道添加回采物料时可以按特别简单的方式快速地畅通卸料巷道,卸料巷道设有一在底板上固定设置的导轨,其在辅助巷道与输送巷道之间的区域内延伸并且在其上引导装料台并且其沿导轨可借助于一移动驱动装置向输送巷道的方向和向反方向移动。
 1032
0
1032
0
一种操纵移动式采矿机的方法,该移动式采矿机包括通过相应的铰接接头连接为列车单元的两个或更多个自操控的并且可选地自推进的相互连接的单元,所述移动式采矿机具有前向方向和后向方向,其中,在隧道跟随模式下该方法包括:-产生表示在移动式采矿机的至少一侧与所述隧道的相应邻近壁之间的侧向距离的第一信号的集合,以及-评估所述第一信号的集合,以确定移动式采矿机在行驶期间相对于所述隧道的壁的侧向位置,以及-产生要被发送至推进装置的操控命令,以保持移动式采矿机的位置,从而在行驶期间确保距隧道壁的间隙。本发明还涉及一种系统和一种移动式采矿机。
中冶有色为您提供最新的其他其他有色金属矿山技术理论与应用信息,涵盖发明专利、权利要求、说明书、技术领域、背景技术、实用新型内容及具体实施方式等有色技术内容。打造最具专业性的有色金属技术理论与应用平台!


 2025年03月28日 ~ 30日
2025年03月28日 ~ 30日  2025年03月28日 ~ 30日
2025年03月28日 ~ 30日  2025年03月28日 ~ 30日
2025年03月28日 ~ 30日  2025年04月11日 ~ 13日
2025年04月11日 ~ 13日  2025年04月25日 ~ 27日
2025年04月25日 ~ 27日