全部
▼
热搜:
 710
710
 0
0
本公开涉及一种控制具有一个或多个铰接车辆单元的履带式移动采矿机(10)的移动的系统和方法。该控制系统通过从手动输入装置或自动输入装置获取输入来工作,所述输入用作用于至少一个驱动参数的设定操作值。控制器产生控制信号,该控制信号被发送到调节装置,该调节装置致动所述移动采矿机的马达(34)。借助于所述机器上的传感器(54、55),实时测量所述驱动参数的实际值,并将该实际值馈送到所述控制器,以用于与原始的所述设定值进行比较。当所述控制器向所述调节装置发送使所述移动采矿机的所述驱动参数重新调整的控制信号时,这些值中的任何差值都被补偿。所公开的控制系统适用于履带驱动的动力车辆单元,以确保线性和非线性路径两者的同步履带移动。
 882
0
882
0
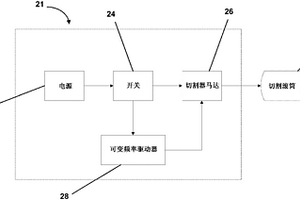
本实用新型公开了一种采矿机器及一种切割滚筒转动机构。其中,一种采矿机器包括切割滚筒和切割滚筒转动机构,在切割滚筒上安装有多个钻头。切割滚筒转动机构包括电源、切割器马达、开关和可变频率驱动器。状态具有第一状态和第二状态。第一状态电联接电源和切割器马达以使切割滚筒在切割速度下操作,并且第二状态电联接可变频率驱动器和切割器马达以使切割滚筒在比切割速度低的维护速度下操作。
 939
0
939
0
本文描述了一种用于电动采矿机械的电功率分配系统和方法。在一个实施例中,一种用于电功率分配的方法包括接收与第一电池组的充电状态相关联的信息,所述第一电池组将电功率供应给前电动马达,该前电动马达被配置用以驱动电动采矿机械的前车轴。所述方法还包括接收与第二电池组的充电状态相关联的信息,所述第二电池组将电功率供应给后电动马达,该后电动马达被配置用以驱动所述电动采矿机械的后车轴。所述方法包括比较所述第一电池组的充电状态与所述第二电池组的充电状态,并且在确定所述第二电池组的充电状态大于所述第一电池组的充电状态时,提高供应给所述电动采矿机械的后电动马达的电功率。
 908
0
908
0
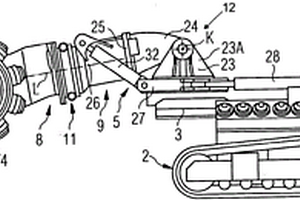
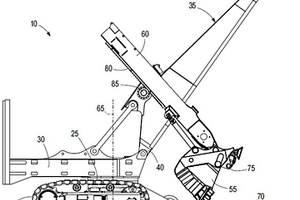
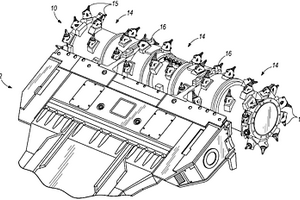
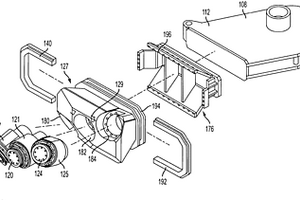
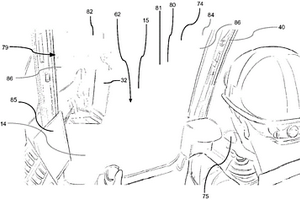
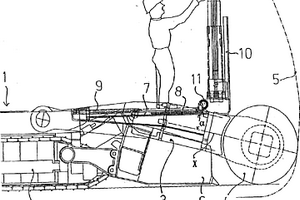
本发明涉及一种移动式采矿机(10),其可包括可移动的机器基架(1),可旋转的刀具滚筒(4)并且包括挖掘刀具(6)。移动式采矿机(10)还可包括具有前支承臂部件(8)和基部部件(9)的悬臂单元(5),以及枢转悬臂单元(5)的枢转装置(27)。移动式采矿机(10)还可包括用于倾斜悬臂单元(5)的倾斜装置(12)以及用于旋转支承臂部件(8)和刀具滚筒(4)的旋转机构(11)。因此,提供了一种移动式采矿机(10),利用这种移动式采矿机甚至可以高开采率和低刀具磨损在硬岩中掘进隧道、巷道或竖井。
 781
0
781
0
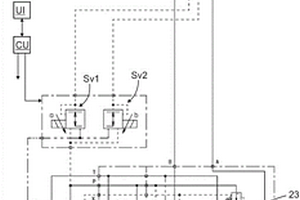
一种液压系统、一种采矿机器和一种控制液压致动器的方法。所述液压系统(HS)设置有控制阀(23),所述控制阀(23)用于控制被连接到所述系统的液压致动器(HA)的移动方向和速度。通过配衡阀(Cb1、Cb2)以及控制所述配衡阀(Cb1、Cb2)的开启压力的伺服阀(Sv1、Sv2)来相对于所述控制阀独立地控制所述液压致动器的所生成的力。所述配衡阀和所述伺服阀用作量出控制组件,所述量出控制组件控制从所述液压致动器的工作压力空间(16a、16b)排出的液压流体的流量。所公开的系统可以被实施用以控制采矿机器(1)的采矿动臂(3)。
 1120
0
1120
0
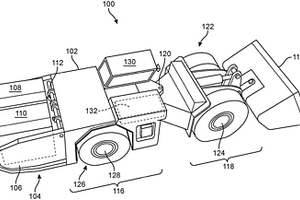
一种采矿机,包括具有两个驱动轨道的基座,所述两个驱动轨道被配置为搁置在地面上并沿第一方向移动所述采矿机。所述两个驱动轨道中的每一个在所述驱动轨道的前端和所述驱动轨道的后端之间具有沿所述第一方向的长度。所述采矿机还包括在所述两个驱动轨道之间延伸的车体、耦接至所述车体的转盘以及连接至所述车体的稳定器附件,所述转盘限定旋转轴。所述稳定器附件沿所述第一方向从所述车体向前延伸,所述稳定器附件包括辊子或板,以接触所述地面并在挖掘操作期间提供稳定支撑。所述旋转轴的位置更靠近所述驱动轨道的前端,而离所述驱动轨道的后端较远。
 1148
0
1148
0
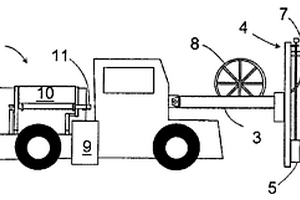
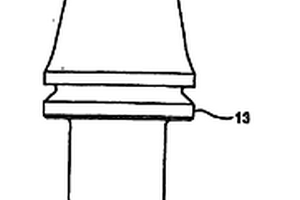
本发明涉及一种用于采矿机械的水泥罐结构,该采矿机械包括混合器(9)、用于水泥的水泥罐(10)和用于将水泥进给到该混合器(9)的进给设备(11)。水泥罐(10)是单独的单元,该水泥罐(10)可以借助于转移装置在位于采矿机械的顶部的使用位置和不同于该使用位置的装填位置之间移动。
 1203
0
1203
0
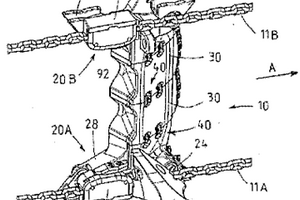
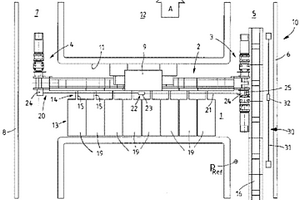
本发明涉及一种用于犁系统的采矿犁(10),所述犁系统用于开采倾斜地层中的矿物。为提供采矿犁及犁系统,利用它们能够经济地并且以高操作安全性开采煤层、特别是急倾斜地层中的煤层,采矿犁10包括可分离的犁本体,所述犁本体具有两个犁本体基本元件(20A、20B),每个犁本体基本元件均设有用于分离的牵引设备的固定件(21)并且设有导向设备(23、22),用于借助于至少两个牵引设备(11A、11B)移动采煤犁并且用于在至少两个彼此间隔开的导向机构(7A、7B)上引导采煤犁。
 1032
0
1032
0
本发明提供一种控制采矿机以使刀头摆动的方法。用于控制采矿机的方法、系统、和计算机可读介质。一种系统,包括刀头、左运输系统、右运输系统和刀头控制器。刀头包括多个钻头和多个部,该多个部限定了至少一个凹槽。左运输系统和右运输系统被配置用以移动采矿机,并且刀头控制器是被配置用以改变左运输系统和右运输系统中的至少一个的当前速度,以使所述多个钻头来回交替,以使所述多个钻头进入与在至少一个凹槽内堆积的材料相接合。
 1104
0
1104
0
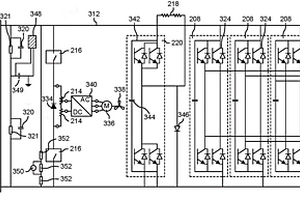
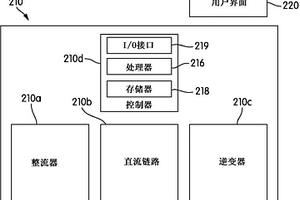
本实用新型公开了一种用于采矿车辆的电力系统,包括同步发电机电路,所述同步发马达电路配置为产生分布在至少六个相位中的交流电源。所述电力系统还包括整流电路,所述整流电路包括至少十二个二极管,并且配置为从所述同步发电机电路接收分布在所述至少六个相位中的所述交流电源并产生直流输出电源。对于从所述同步发电机电路接收的所述交流电源的单波,所述直流输出电源包括至少十二个脉冲。所述整流电路配置为输出所述直流输出电源,用于为所述采矿车辆的负载装置供电。本实用新型提供用于采矿车辆的电力系统,所述电力系统提高了采矿车辆的可靠性和质量。
 852
0
852
0
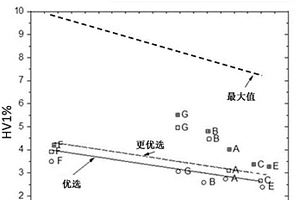
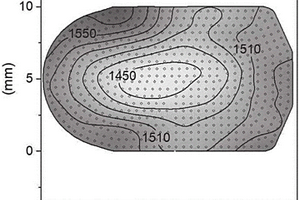
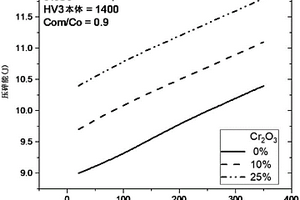
一种将硬质合金采矿刀片的粘结剂相重新分布的方法,所述硬质合金采矿刀片包含一种或多种硬质相成分和粘结剂,所述方法包括如下步骤:a)提供生坯硬质合金采矿刀片;b)将选自金属氧化物或金属碳酸盐中的至少一种粘结剂拉拔剂施加至所述生坯硬质合金采矿刀片的表面上;并且c)将所述生坯硬质合金采矿刀片进行烧结;其特征在于,将所述金属氧化物或金属碳酸盐仅施加至所述生坯硬质合金采矿刀片的表面上的至少一个局部区域;以及一种具有硬度梯度的硬质合金及其用途。
 1086
0
1086
0
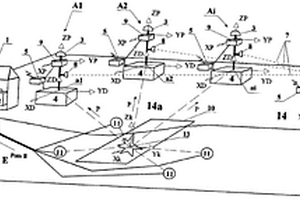
本发明涉及一种用于确定采矿设备的设备部件的位置和/或地点的方法,所述采矿设备包括作为设备部件的至少一个用于移除所开采材料的工作面输送机(2)、一个用于保持工作面(1)敞开的防护式支承件(13)、用于在活动操作时推动工作面输送机(2)和防护式支承件(13)的推动装置(14)、能够沿着工作面输送机(2)移动的采掘机(9)、以及平巷输送机(16),至少一个设备部件的位置及地点借助于测量系统(20)确定,所述测量系统包括具有测量传感器的检测单元。根据本发明,与采掘机(9)的运动分离的检测单元(22)借助于分开的导向系统(21)在导向系统(21)的两点之间沿着位于工作面处诸如工作面输送机(2)的至少一个设备部件往复移动。本发明还涉及采矿设备(10)自身。
 762
0
762
0
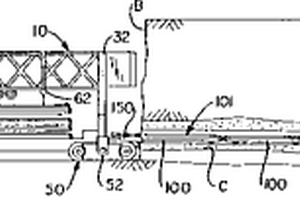
本发明的实施例涉及高墙采矿,更具体地,涉及适用于可采矿材料如煤炭的向下有角度接缝的高墙采矿的发射车辆。更具体地,所提供的发射车辆包括基本上水平定向的控制甲板,枢转地连接到控制甲板的发射甲板和基本上水平定向的输送带。采矿机和至少一个输送车位于发射甲板上,而发射甲板处于基本上水平的方向,然后发射甲板相对于输送带向上倾斜,以基本上匹配要开采的接缝的计划进入倾角。当采矿机和至少一个输送车前进到接缝中时,发射甲板返回到基本水平的定向,额外的输送车被添加到发射甲板上,并且发射甲板再次倾斜以基本上匹配接缝的进入倾角,以将额外的输送车连接成输送列车中的最后车。
 1187
0
1187
0
本实用新型公开了一种采矿机及产生用于交流电机的变频电压的系统。所述采矿机包括电机、为电机提供电压的可调速驱动器,电压具有激励分量,该激励分量包括用于驱动使电机在期望速度下运行的幅度和频率、还包括用于检测接地故障状况的附加的电压分量、以及接地故障继电器,用于当接地故障电流超过预定阈值时,检测接地故障电流。
 835
0
835
0
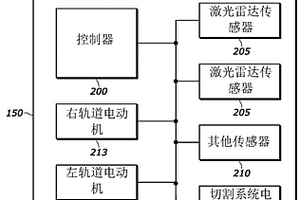
本申请公开了用于在采矿机执行切割操作时控制采矿机的前进方向的方法和系统。一个系统包括采矿机的切割系统和一组左右轨道。所述系统还包括安装在采矿机上的激光雷达传感器。所述系统还包括电子处理器,所述电子处理器被配置成从激光雷达传感器接收数据。电子处理器还被配置为基于从激光雷达传感器接收的数据确定采矿机的当前前进方向,并将当前前进方向与采矿机的目标前进方向进行比较。响应于采矿机的当前前进方向与采矿机的目标前进方向相差预定的量,电子处理器被配置成控制采矿机以调整采矿机的当前前进方向。
 1116
0
1116
0
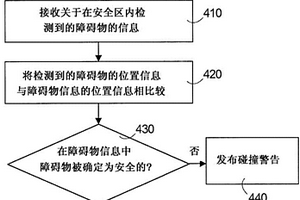
本发明涉及一种用于采矿车辆的安全系统的方法。该方法包括当采矿车辆行驶时扫描采矿车辆的周围环境,以及如果在采矿车辆的安全区内检测到障碍物,则给出碰撞警告。在该系统中,存储了障碍物信息,该障碍物信息至少包括预定障碍物的位置信息。将基于扫描检测到的障碍物的位置信息与在障碍物信息中确定的位置信息相比较。响应于基于检查障碍物信息而将检测到的障碍物确定为安全的,可以阻止由于检测到障碍物而由安全系统引发的使采矿车辆停止。
 1024
0
1024
0
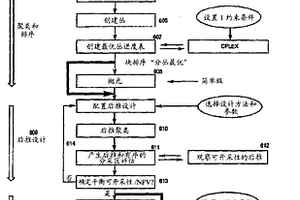
本发明涉及从特定位置开采资源的领域。特别地,本发明涉及与采矿位置有关的规划、设计以及处理,其方式为基于提高相对于开采该物质的努力和/或时间而言认为有价值物质的开采。本申请尤其披露了用于进行后推设计的确定斜度约束条件,确定物质簇,确定所选部分的物质的特性,分析所选体积的物质,扩展簇,形成簇,采矿设计,将块聚集成集合或簇,将丛中的废料和矿石分离,确定要开采的所选组的块,丛次序以及确定簇的方法和装置。
 1084
0
1084
0
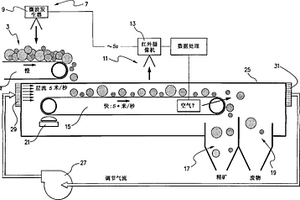
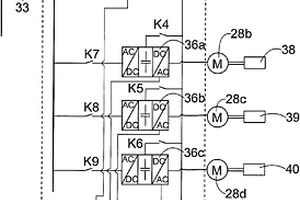
本发明涉及一种采矿车辆及其能量供给的方法。所述采矿车辆具有载架(3)、用于移动载架(3)的驱动设备(4),以及至少一个采矿工作装置(2)。此外,所述采矿车辆(1)具有用于操作采矿车辆(1)的主要功能的至少一个电动机(28a),以及用于操作采矿车辆的辅助功能的至少一个电动机(28b、28c、28d)。所述采矿车辆(1)还具有发电辅助单元(26)。所述发电辅助单元(26)在需要时供应操作辅助功能的所述电动机(28b、28c、28d)所需要的功率的至少部分功率。
 1184
0
1184
0
一种将硬质合金采矿刀片的粘结相重新分布的方法,所述硬质合金采矿刀片包含WC硬质相成分、任选的一种以上其它硬质相成分和粘结剂,所述方法包括以下步骤:提供硬质合金采矿刀片生坯;将选自金属氧化物或金属碳酸盐的至少一种粘结剂拉拔剂施加至所述硬质合金刀片生坯的5表面的仅至少一个局部区域;烧结所述硬质合金采矿刀片生坯以形成烧结的硬质合金刀片;和使所述烧结的硬质合金刀片经受在100℃以上的升高的温度下、优选在200℃以上的温度下、更优选在200℃至450℃之间的温度下进行的干法翻滚工序。
 869
0
869
0
本发明涉及具有驱动圆盘刀具的采矿机。具体地,本发明涉及一种包括切削机构的采矿机,该切削机构具有臂和连接到该臂的大于一千磅的大配重。该采矿机还包括第一圆盘刀具,该第一圆盘刀具适于接合待开采的材料并安装在第一圆盘刀具组件上,用于偏心驱动第一圆盘刀具,第一圆盘刀具组件安装在该大配重内。采矿机还包括至少第二圆盘刀具,该第二圆盘刀具与第一圆盘刀具组件分隔开并适于接合待开采材料,而且安装在第二圆盘刀具组件上,用于偏心驱动第二圆盘刀具,该第二圆盘刀具组件安装在该大配重内。
 890
0
890
0
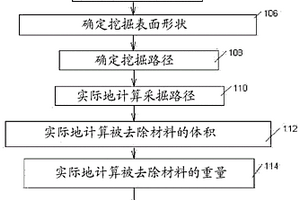
提供了一种方法,其中扫描挖掘表面(104),基于所扫描的挖掘表面来确定挖掘表面形状(106),从采矿挖掘设备识别挖掘路径(108、110),至少基于挖掘表面形状和采矿挖掘设备的挖掘路径来实际地计算由采矿挖掘设备挖掘的材料的体积(112),以及基于至少一个密度因数来实际地计算由采矿挖掘设备挖掘的材料的重量(114)。
 1073
0
1073
0
一种具有采矿设备的精确采矿系统,采矿设备是能操纵的以采收包含矿物资源的材料,系统包括:图像传感器,其用于捕获具有包含矿物资源的材料的地理位置以及采矿设备的至少一个元件的实时图像;存储装置,其包括指令和实时图像;以及处理器,其被配置为执行指令,以从图像传感器接收实时图像;至少一个感测装置,其与采矿设备的至少一个元件相关联,该至少一个感测装置被配置为获取与采矿设备的至少一个元件在实时图像中的位置和运动中的至少一项对应的数据;处理器被配置为执行指令,以生成与包含矿物资源的关注体积对应的至少一个生产多边形,并且将实时图像与至少一个生产多边形进行组合,以生成实时复合图像。
 1098
0
1098
0
一种用于评估由地下采矿产生的高能大地突裂风险的方法,其特征在于所述方法包括以下步骤:用三轴振动传感器(4)在同时且时间和空间紧密重合的情况下进行地面上的振动(Epoml.)的测量,通过用于定位地震突发的矿场系统(12)进行地下突裂参数(Epomll.)的测量,用三轴位移传感器(9)进行地面上的位移(Upom)的测量,所述三轴位移传感器用视距仪测试套件(B)周期性地调整,并且将这些测量记录在分析微处理器(2a)的测量数据存储库(17)中。随后,在所述分析微处理器(2a)中处理这些测量的集,并通过评估关键现象来预测在时空上的高能突裂危险,考虑组合观察类似决定性的和时空广阔的岩体变形过程以及在时频域上呈岩体颗粒短期振动形式的抗震现象。所述过程和现象的联合影响比局部累加空间更广泛。适合的系统包括处理中心(1),所述处理中心具有处理服务器(2),所述处理服务器连接到无线调制解调器(5)、所述分析微处理器(2a)以及用于定位地震突发的矿场系统(12)上,所述矿场系统通过线连接到地震检波传感器(11)上。在所观测的采矿区域(15)上安装测量套件(A1、A2、…Ai)。这些测量套件(A1、A2、…Ai)中的每一者由卫星导航接收器(3)构成,所述卫星导航接收器是在空间上与所述三轴振动传感器(4)整合的所述三轴地面位移传感器(9),所述三轴地面位移传感器和所述三轴振动传感器连接到所述无线调制解调器(5)上。在不因采矿而变形的区域上布置所述视距仪测量套件(B),其配备有自动视距仪(6),所述自动视距仪具有激光照准仪(6a),所述视距仪测量套件连接到所述视距仪的所述卫星导航接收器(3)以及所述无线调制解调器(5)上。
 1023
0
1023
0
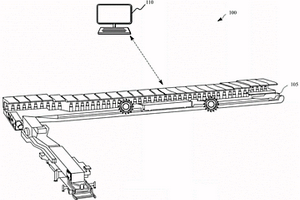
一种用于控制长壁采矿系统的控制器。控制器包括非暂时性计算机可读介质和处理器。控制器还包括存储在计算机可读介质中的计算机可执行指令,用于控制工业机械的操作以便:从第一相机接收第一信号,从第二相机接收第二信号,分析第一信号和第二信号中的至少一个信号以识别在采掘机行进的第一方向上或在采掘机行进的第二方向上位于采掘机前方的长壁采矿系统的结构的一个或多个边缘,基于一个或多个边缘生成前瞻性的矿井概况,以及基于前瞻性的矿井概况控制长壁采矿系统。
 1162
0
1162
0
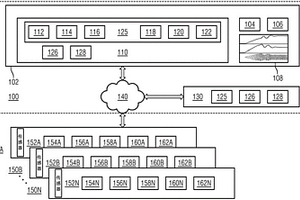
公开了一种用于管理包括多个系统的采矿设施(150A‑N)的方法、装置和系统。该方法包括:在仿真单元(102,330)上生成采矿设施(150A‑N)的多个系统中的一个或多个系统的系统模型(210,220,230,240),其中,这些系统模型(210,220,230,240)是基于来自采矿设施(150A‑N)处的多个系统的输入信号、传感器数据和输出信号中的一者生成的;基于系统模型(210,220,230,240)之间的相关性生成采矿设施(150A‑N)的设施模型(200);以及通过使用设施模型(200)对采矿设施(150A‑N)的操作进行仿真来管理采矿设施(150A‑N)。
 733
0
733
0
本发明涉及一种用于地下采矿的可移动的掘进及采矿机,其包括:多个可在工作面运动的并且由一个支承臂(3)支承的截割工具(4),该支承臂可偏转地固定在掘进及采矿机(1)的框架(2)上;以及一个配属于掘进及采矿机(1)的锚杆钻孔及安置装置(10),该锚杆钻孔及安置装置可偏转地固定在一个滑块(8)的前端部上,该滑块在一个滑块导向装置(7)上可移动地被引导,其中,锚杆钻孔及安置装置(10)可翻转到滑块(7)和滑块导向装置(8)上。为了在这样一种掘进及采矿机中节省用于锚杆钻孔及安置装置(10)的安装空间和为了在工作时更好地支撑锚杆钻孔及安置装置(10),本发明建议,所述滑块导向装置(7)设置在支承臂(3)的上侧上并且由支承臂(3)支承。
中冶有色为您提供最新的其他其他有色金属矿山技术理论与应用信息,涵盖发明专利、权利要求、说明书、技术领域、背景技术、实用新型内容及具体实施方式等有色技术内容。打造最具专业性的有色金属技术理论与应用平台!


 2025年03月20日 ~ 22日
2025年03月20日 ~ 22日  2025年03月21日 ~ 23日
2025年03月21日 ~ 23日  2025年03月21日 ~ 23日
2025年03月21日 ~ 23日  2025年03月28日 ~ 30日
2025年03月28日 ~ 30日  2025年04月24日 ~ 27日
2025年04月24日 ~ 27日