全部
▼
热搜:
 701
701
 0
0
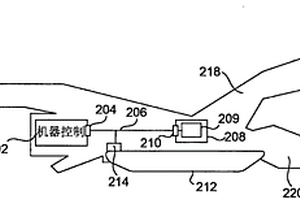
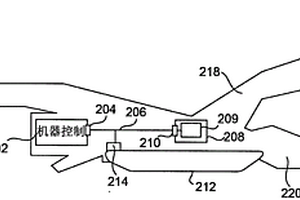
采矿机器的导航。本公开涉及一种采矿机器,该采矿机器包括:机器控制器,其包括用于机器控制信号的控制输出端口,所述机器控制信号控制所述采矿机器的移动;以及惯性导航系统(INS)。所述INS包括:位置确定单元,其确定所述采矿机器的位置,以及输入端口,其用于表示所述采矿机器的移动的输入信号,所述输入端口与所述位置确定单元通信耦合。所述机器控制器的所述控制输出端口与所述INS的用于所述输入信号的所述输入端口通信耦合,以允许所述位置确定单元基于控制所述采矿机器的移动的所述机器控制信号来计算所述采矿机器的校正后的位置。
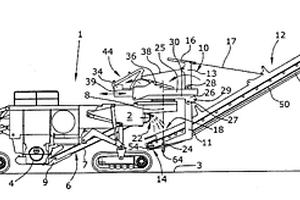
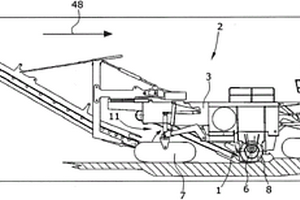
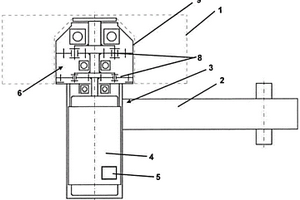
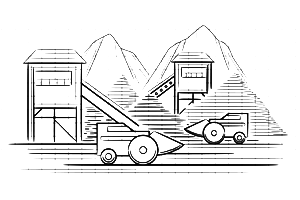
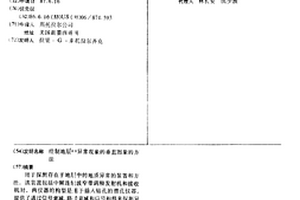
用于处理地面(3)的采矿机器(1),具有第一传送设备(6),其从切割鼓(4)接收采矿材料,第二传送设备(12),其在接收点(18)处接收来自该第一传送设备(6)的采矿材料,该接收点(18)设置在该第二传送设备(12)的下端(14)处,并位于该第一传送设备(6)的上端(22)之下,用于第二传送设备(12)的传送悬挂设备(10),其安装在机器框架(2)上以绕着垂直的回转轴线(8)回转,其中该第二传送设备(12)可绕着横向于该第二传送设备(12)的纵向方向的第一水平枢转轴线(24)枢转,并安装在该传送悬挂设备(10)中,所述传送悬挂设备(10)和第二传送设备(12)一起可相对于机器框架(2)绕着第二水平枢转轴线(28)枢转。
 1013
0
1013
0
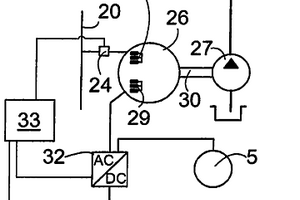
本发明涉及采矿车辆和用于采矿车辆的能量供给的方法。采矿车辆具有:车架;用于移动车架的驱动装备;和至少一个采矿作业装置。采矿车辆进一步具有:电动马达,用于对采矿作业装置供给动力;连接器,用于将电力从矿场的电网供给到电动马达;和能量源。电动马达至少包括一次定子绕组和二次定子绕组,使得一次定子绕组和二次定子绕组彼此电隔离。当采矿车辆经由一次定子绕组连接到矿场的电网时,电动马达被布置成:至少在一段时间内对至少一个采矿作业装置供给动力,并且至少在一段时间内经由二次定子绕组供给动力用于对能量源充电。
 1134
0
1134
0
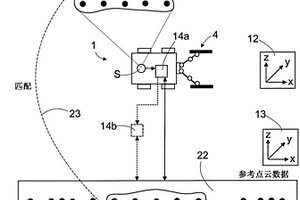
本发明涉及一种采矿车辆和方法。采矿车辆包括至少一个扫描装置,该扫描装置用来扫描采矿车辆的周围并生成运行点云数据。采矿车辆包括控制单元,该控制单元设有矿的参考点云数据。控制单元被配置为将运行点云数据与参考点云数据匹配,以确定采矿车辆的位置。控制单元进一步包括采矿工作平面图,该采矿工作平面图连接到所探测到的采矿车辆的位置。
 769
0
769
0
本公开涉及一种采矿机器,该采矿机器包括:机器控制器,其包括用于机器控制信号的控制输出端口,所述机器控制信号控制所述采矿机器的移动;以及惯性导航系统(INS)。所述INS包括:位置确定单元,其确定所述采矿机器的位置,以及输入端口,其用于表示所述采矿机器的移动的输入信号,所述输入端口与所述位置确定单元通信耦合。通信链路将所述机器控制器的所述控制输出端口与所述INS的用于所述输入信号的所述输入端口连接,以允许所述位置确定单元基于控制所述采矿机器的移动的所述机器控制信号来计算所述采矿机器的校正后的位置。
在建筑机械或采矿机械工作鼓的一种鼓壳体中,所述工作鼓用于清理可在作业方向上移动的被铣刨掉的材料,所述工作鼓设有工具并且围绕鼓轴线旋转,其中壳体壳层至少部分地包绕工作鼓的周面,其中至少一个监控装置径向布置于壳体壳层的外侧,所述监控装置能够检查工作鼓或其工具的状态;其具有以下下述特征:适于每一个监控装置的至少一个检查开口布置于壳体壳层内;以及在铣刨操作过程中被铣刨掉材料的部分流量通过所述至少一个检查开口,以及引导装置在从作业方向看去壳体壳层的后面、工作鼓的前面、或工作鼓的后面径向地对所述部分流量进行引导。
 916
0
916
0
本发明提供了一种用于采矿系统的发射车(1),该发射车包括设有履带的基架(2),围绕基本竖直的旋转轴线可旋转地连接至该基架(2)的上框架(3),连接至所述上框架(3)的发射框架(5),安装在该发射框架上的起重机单元,工程车或履带车以及用于驱动连续的履带、发射框架(5)、起重机单元或其组合的驱动机构。
 740
0
740
0
本发明涉及一种用于采矿机(1000)的网处理装置(1),包括大致U形框架(2),其用于接纳网(100)并将所述网(100)定位抵靠于地下隧道的坑顶(110)部分;所述框架(2)包括至少一个大致U形导轨(4、6);以及引导装置(8),其用于沿所述导轨(4、6)在基本垂直于所述采矿机(1000)的纵向方向(A)的方向上引导所述网(100)。此外,本发明涉及一种采矿机(1000)。
 963
0
963
0
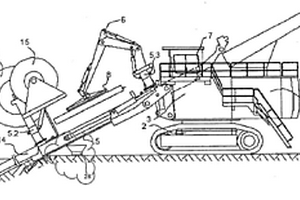
在矿业中用于获取矿物材料的滚筒式采矿装载机中,所述滚筒式采矿装载机具有至少一个采矿滚筒(1),所述采矿滚筒可转动地支承在可枢转的支臂(2)上,所述采矿滚筒由在支臂头部(3)的区域中设置在支臂(2)的相同端部上的驱动马达(4)驱动,如果所述同步马达(4)实施为永磁激励的同步电机,所述同步电机在所述采矿滚筒(1)运行期间提供用于使所述采矿滚筒(1)转动所需的总驱动功率,那么能够提供用于所有运行状态的紧凑的驱动单元。
 1079
0
1079
0
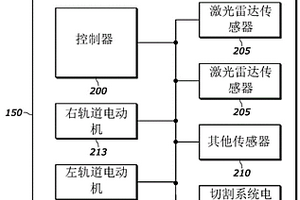
本申请公开了一种用于在采矿机执行切割操作时控制采矿机的前进方向的系统。所述系统包括采矿机的切割系统和一组左右轨道。所述系统还包括安装在采矿机上的激光雷达传感器。所述系统还包括电子处理器,所述电子处理器被配置成从激光雷达传感器接收数据。电子处理器还被配置为基于从激光雷达传感器接收的数据确定采矿机的当前前进方向,并将当前前进方向与采矿机的目标前进方向进行比较。响应于采矿机的当前前进方向与采矿机的目标前进方向相差预定的量,电子处理器被配置成控制采矿机以调整采矿机的当前前进方向。
在用于铣削露天挖掘采矿表面或用于铣削沥青或混凝土交通路面的脱离层的方法中,具有移除地表面的铣削机,通过沿着具有预定长度的预定的铣削轨迹铣削地面,通过经由传送设备将铣削的材料传送到至少一个卡车的容器,该卡车靠近铣削机行进,提供用于实现下述特征:作为当前有效工作宽度和铣削深度的函数,从当前铣削轨迹的长度计算最大总装载量,该铣削深度已经基于预定的、优选的最大铣削能力而优化,计算铣削轨迹的最大总装载量所需的卡车装载的数量,确定当前铣削轨迹的有效总装载量,其产生自最接近的总装载数量的量,和调整在铣削轨迹长度上铣削机的可调整的总铣削量,以匹配得出总装载数量的有效的总装载量。
 1119
0
1119
0
一种稳定和绿化岩坡用的蜂巢式型框,由框柱围成的型框体所构成。框柱所围成部分为喷植区,供喷植植物生长,框柱表面则设有孔洞,可以用来安装可调式网栅,截留植生基材和挡风遮日,孔洞还可安装防冲导流栅,使迳流尽快流入排水沟防止冲刷;框柱则为中空半圆形结构,内部蓄容强力保水剂,改良地质的泥炭土,缓效性粒肥肥束条等,促进植物生长,从而该型框可布设于各种复杂的岩坡上,发挥稳定和绿化岩坡的作用。


 1060
0
1060
0
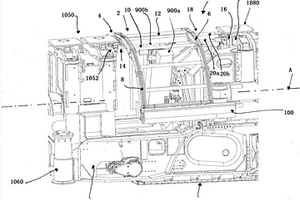
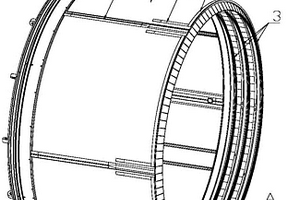
本实用新型提供的带有集成地面冻结管的隧道掘进机的尾盾,包括壳体,设置在壳体内的冻结管线以及与冻结管线连通的冷冻剂供应系统,所述壳体为筒状,所述冻结管线包括沿所述壳体周向设置的若干环形管、与所述环形管连通的连接管,连接管沿着壳体的轴向分布,所述连接管与冻结管线连通。本实用新型提供的带有集成地面冻结管的隧道掘进机的尾盾,其能够将掘进机周围的地质体和水冻结,防止修理或更换尾盾密封刷时地下水流入。
 828
0
828
0
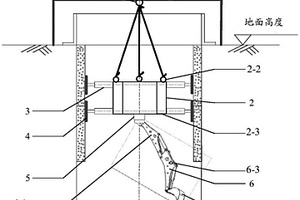
本实用新型涉及钢平台和竖井孔壁固定式挖掘设备。钢平台包括:钢平台框架,其能够通过连接绳与井架连接并且悬垂在井架下方;钢平台框架支撑装置,其可拆卸或不可拆卸地固定到钢平台框架,将钢平台框架支撑在竖井的井壁上;悬挂装置,其位于钢平台框架的下方,用于连接用于挖掘的装置。竖井孔壁固定式挖掘设备包括:井架;如上所述的钢平台,其与井架通过连接绳连接;用于挖掘的装置,其连接到悬挂装置并且能够被悬挂装置带动而在竖井内进行旋转挖掘或切削。本实用新型的钢平台和竖井孔壁固定式挖掘设备可以在竖井内没有任何工人的情况下实现竖井挖掘,避免产生工人健康和安全方面的问题,改进了对地质的自动化挖掘。
 1035
0
1035
0
本发明涉及一种用于制造缆线的方法,该缆线包括至少一个细长导电元件、包围细长导电元件的至少一个复合层和包围复合层的至少一个聚合物护套,该复合层包括浸渍有地质聚合物材料的非织造纤维材料,该方法使用塑料材料的管以促进围绕复合层的聚合物护套的挤出。
 1162
0
1162
0
可以至少部分地基于各向异性地层模型和成本函数,通过反演电磁(EM)测井曲线数据来确定诸如垂直电阻率值、水平电阻率值、倾角和方位角之类的地质地层的属性。成本函数可以包括数据不匹配项、平滑度项和熵项。在一些实施例中,数据不匹配项、平滑度项和熵项中的一个或多个可以表示为垂直电导率和水平电导率的函数。成本函数可以包括至少部分基于数据不匹配项的一个或多个正则化参数。此外,成本函数可以包括一个或多个松弛因子,其至少部分地基于平滑度项和数据不匹配项的Hessian的比率。
 889
0
889
0
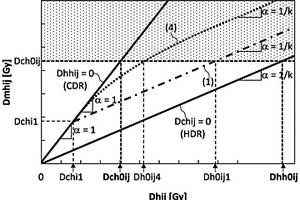
本发明涉及一种治疗计划系统(TPS),所述治疗计划系统用于产生用带电粒子束,优选地用质子束治疗靶组织(3t)的计划,所述靶组织包含被包围在外周表面内的肿瘤细胞,所述外周表面被健康细胞围绕和/或还包围健康细胞,其中所述健康细胞形成了健康组织(3hi),其中下标i表示健康组织(3hi)的类型,其中所述计划由N个份量的辐照组成,其中N≥1,并且所述计划包含将包括以下的N个份量进行组合:·以定义为剂量速率CDR<1Gy/s的常规剂量沉积速率(CDR)辐照包括肿瘤细胞和/或健康细胞的区,和/或·以定义为剂量速率HDR≥1Gy/s的超高剂量沉积速率(HDR)辐照包括肿瘤细胞和/或健康细胞的区。
 683
0
683
0
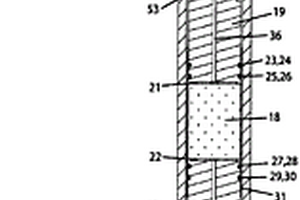
本发明涉及一种可承受高压和高温的样本保持器。在一个实施方案中,本发明的样本保持器可用于使地质样本处于与所述样本在其原生地下环境中将会经历的温度和压力相同的温度和压力。本发明提供一种用于以流体静力学方式围限岩石岩心样本以模拟地面下压力,同时允许在需要时引导流体通过所述岩心的机构。在各种实施方案中,用于所述样本保持器的外壳的材料(具体来说,陶瓷氧化锆)以及将末端固定件安装于所述外壳中所借助的机构(例如,方形螺纹或改型方形螺纹)允许在比当前可用系统所提供的压力和温度更高的压力和温度下操作。在一个实施方案中,本发明的装置可用于经由NMR光谱法或MRI来分析岩石岩心样本。
 966
0
966
0
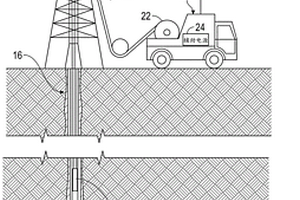
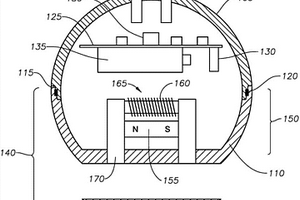
本发明提供了用于测量沿着地下井的特性的无缆装置。根据至少一个实施例,无缆装置包括外壳(105,205)和配置成测量沿着地下井的数据的一个或多个传感器(175,225)。数据包括地下井中的一个或多个物理、化学、地质或结构特性。无缆装置还包括:处理器(125),其被配置为控制测量数据的一个或多个传感器(175,225)并存储测量的数据;以及发射机(180),其被配置为将测量的数据发送到布置在地下井外部的接收机。此外,无缆装置包括控制器(140),控制器被配置为控制无缆装置的浮力或阻力以控制无缆装置在地下井中的位置。处理器(125)包括对地下井内的无缆装置的一个或多个传感器(175,225)的测量参数进行限定的指令。
 1025
0
1025
0
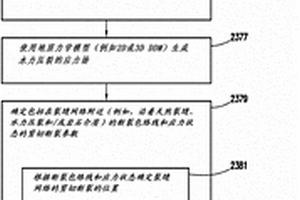
提供了一种用于在井场执行压裂操作的方法,所述井场在具有含天然裂缝的裂缝网络的地下地层附近。通过将流体注入到所述裂缝网络中而使所述井场增产。所述方法包括生成包括天然裂缝参数的井场数据并且获得微震事件的测量,基于所述井场数据对所述裂缝网络的水力压裂进行建模并且定义所述水力压裂的水力压裂几何形状,使用地质力学模型生成所述水力压裂的应力场,确定包括在所述裂缝网络附近的断裂包络线和应力状态的剪切断裂参数,根据所述断裂包络线和所述应力状态确定所述裂缝网络的剪切断裂的位置,以及通过对于所测量的微震事件而将所述建模的水力压裂和剪切断裂的所述位置相比较来校准所述水力压裂几何形状。
 707
0
707
0
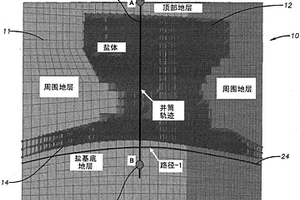
用于预测地层中,尤其是那些具有诸如盐丘等地质结构的地层中,泥浆比重窗口的系统和方法。一个实施例为计算机实施方法,以3-D来建模地层,并使用有限元分析来确定所建模3-D地层的多个有效应力比。之后,绘制穿过3-D建模地层的拟建井筒的轨迹,并选择沿所述井筒的具体有效应力比来形成数据集合。然后将有效应力比的3-D数据集合输入到1-D建模软件中,并与1-D数据相结合。之后利用结合的数据来估计所述井筒周围地层的泥浆比重窗口。
 721
0
721
0
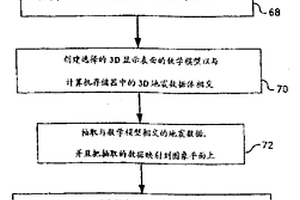
把地震数据(66)的放大计算机绘图图象显示在具有与从一个三维地震数据体(70)中抽取的选择数据的形状相对应的形状的一个凹三维表面(68)上。因而,提供一个地震表面的放大图象,其中数据在三维中是空间正确的,并且这使得分析者能容易定位诸如地层、断层、及通道的地质特征(76)。
 984
0
984
0
用于探测存在于地层中的地质异常的装置和方 法。该装置包括中频连续波窄带调频发射机和接收 机对。两仪器的构型是用于插入钻孔的潜孔仪器。 提供了通过信号衰减、路径衰减和信号相移来探测异 常情况的勘测方法。在钻孔内的不同深度上的连续 测量仪,为判定各种异常情况的存在提供了数据。运 用断层扫描术提供了一幅异常现象的可见图象。计 算机辅助重建术提供了来自所产生数据的这类可见 图象。
 1078
0
1078
0
用于流体控制的方法和一种自调节阀或流动控制装置,特别用于从油和/或气储层中的井生产油和/或气的生产管,该生产管包括最好分为至少两个部分(1)的下排出管,每个部分包括一个或多个流入控制装置(2),所述流入控制装置使地质生产地层与排出管的流动空间相通。流体流过入口(10),并通过该控制装置(2)的流道(11),该流道流经可活动的盘(9)或可活动的装置,该可活动的盘(9)或可活动的装置设计用于相对于入口的开口活动,从而通过使用BERNOULLI效应和在盘(9)上产生的滞留压力而减小或增加流通面积(A2),由此,该控制装置基于预先估计的流动设计,根据流体组分及其性质自主地调节流体的流动。
 1063
0
1063
0
本发明涉及利用气体注射的自动吹扫系统,并且本发明提出了一种用于带有橡胶隔膜的管形瓶的自动气体注射系统,用于在24个或更多个位置中同时注射气体,具有注射压力控制和/或过压检测,应用于质谱分析和/或气体色谱分析。本发明可以例如用于具有碳酸盐提取单元的设备中的地质材料的同位素分析,用于待在同位素分析或色谱分析中使用的管的清洁和净化,以及用于在有机材料和无机材料的分析中对来自蒸汽拖动或通过连续流所产生的、或者来自管形瓶或管的自由空间的污染物的移除。
中冶有色为您提供最新的其他其他有色金属矿山技术理论与应用信息,涵盖发明专利、权利要求、说明书、技术领域、背景技术、实用新型内容及具体实施方式等有色技术内容。打造最具专业性的有色金属技术理论与应用平台!


 2025年03月28日 ~ 30日
2025年03月28日 ~ 30日  2025年03月28日 ~ 30日
2025年03月28日 ~ 30日  2025年03月28日 ~ 30日
2025年03月28日 ~ 30日  2025年04月11日 ~ 13日
2025年04月11日 ~ 13日  2025年04月24日 ~ 27日
2025年04月24日 ~ 27日