权利要求
1.一种
复合材料板材超声波检测机器人,其特征在于:包括驱动模块(1)、导轨支架模块(2)和主控模块(3),所述导轨支架模块(2)为一方形框架,方形框架两侧为圆柱支架(21),所述驱动模块(1)底部设有橡胶吸盘(18)、设置在导轨支架模块(2)两端,驱动模块(1)通过内部微型
隔膜真空泵控制橡胶吸盘(18)的真空度,控制检测机器人吸附固定在受检复合材料板材(4)表面;所述主控模块(3)设置在圆柱支架(21)上、可沿圆柱支架(21)左右移动,驱动模块(1)通过无线传输模块与主控模块(3)建立联系,主控模块(3)通过无线传输模块传输指令和数据,控制驱动模块(1)实现水平和垂直两个方向移动;所述主控模块(3)包括主控模块机箱(31)、相控阵模块(32)、相控阵探头(35)、水箱(34)和电动伸缩杆(36),主控模块机箱(31)位于主控模块(3)中部,相控阵模块(32)和水箱(34)位于主控模块机箱(31)两侧,水箱(34)为相控阵探头(35)提供耦合剂,电动伸缩杆(36)位于主控模块机箱(31)下部、实现相控阵探头(35)的起落;相控阵模块(32)处理检测数据并将检测数据无线传输给移动终端设备(5)进行数据分析、评判,实现对复合板材的超声波自动检测。
2.根据权利要求1所述的复合材料板材超声波检测机器人,其特征在于:所述驱动模块(1)包括驱动模块机箱(11)、支臂(15)、支柱(17)和橡胶吸盘(18),两个支臂(15)相互垂直设置,支臂(15)两端通过圆柱形支柱(17)各连接一个橡胶吸盘(18),驱动模块机箱(11)内部设有无线传输模块和伺服电机模块一(19),伺服电机模块一(19)前端设有直齿轮,支臂(15)中部设有直齿导轨一(16),直齿导轨一(16)与驱动模块机箱(11)内部伺服电机模块一(19)直齿轮相啮合;伺服电机通过正反方向转动,精确控制支臂(15)的左右位移,两个相互垂直支臂(15)的相对移动可实现机器人在受检复合材料板材(4)表面的左右、上下移动,进而实现对复合板材的全面检测。
3.根据权利要求2所述的复合材料板材超声波检测机器人,其特征在于:所述驱动模块机箱(11)表面设有按压开关一(13)、电源指示灯(12)和USB接口(14)。
4.根据权利要求1所述的复合材料板材超声波检测机器人,其特征在于:所述导轨支架模块(2)为由圆柱体型
铝合金钢管焊接组成方形框架,其中长边的两根铝合金钢管为圆柱支架(21),短边的两根铝合金钢管中部设有两根垂直向下的支柱、用于与驱动模块(1)连接;圆柱支架(21)中部设有直齿导轨二(22),用于与主控模块(3)的主控模块机箱(31)连接。
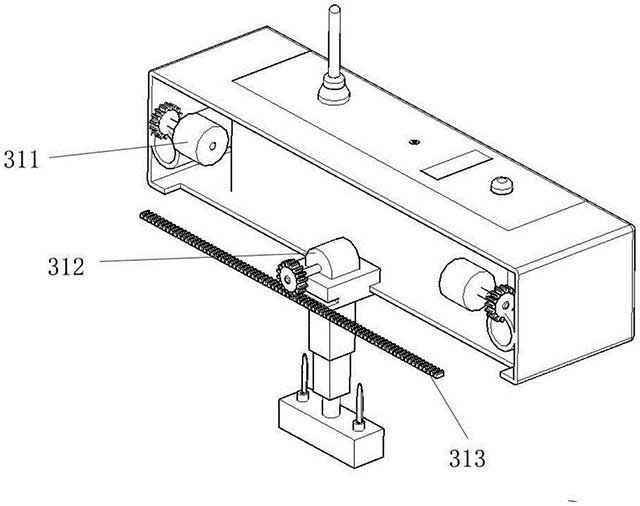
5.根据权利要求1所述的复合材料板材超声波检测机器人,其特征在于:所述主控模块机箱(31)包括伺服电机模块二(311)、伺服电机模块三(312)和直齿导轨三(313),电动伸缩杆(36)上部与伺服电机模块三(312)相连,下部与相控阵探头(35)相连,通过对电动伸缩杆(36)的伸缩控制可实现相控阵探头(35)的起落,并能为相控阵探头(35)提供稳定压力;所述伺服电机模块二(311)设置在主控模块机箱(31)内部,伺服电机模块二(311)前端设有直齿轮,直齿轮与导轨支架模块(2)的直齿导轨二(22)相啮合,通过控制伺服电机正反方向转动,控制主控模块(3)在导轨支架模块(2)上的的左右移动,从而实现相控阵探头(35)在被检复合板材表面的往复扫查。
6.根据权利要求1所述的复合材料板材超声波检测机器人,其特征在于:所述主控模块机箱(31)中部设有两个导轨孔(33),与导轨支架模块(2)圆柱支架(21)尺寸相匹配,圆柱支架(21)穿过导轨孔(33),使主控模块(3)和导轨支架模块(2)组合在一起。
7.根据权利要求1所述的复合材料板材超声波检测机器人,其特征在于:所述主控模块机箱(31)下部设有矩形轨道(37),电动伸缩杆(36)上部凹型结构体嵌入轨道(37),凹型结构体上部设有驱动电机,驱动电机前端直齿轮与主控模块机箱(31)下部直齿导轨三(313)相啮合,通过控制伺服电机正反方向转动,控制电动伸缩杆(36)在主控模块机箱(31)下部轨道(37)前后移动,从而实现相控阵探头(35)在被检复合板材表面的往复扫查。
8.根据权利要求1所述的复合材料板材超声波检测机器人,其特征在于:所述水箱(34)上部设有圆形水箱盖(341),内部加入超声波液体耦合剂,通过水箱内部的压缩泵,将耦合剂经塑料导管(342)泵送至相控阵探头(35)下部,使相控阵探头(35)与被检复合板材良好耦合。
9.根据权利要求1-8任一项所述的复合材料板材超声波检测机器人,其特征在于:所述相控阵模块(32)外部设有按压开关二(321)、液晶显示屏(322)、充电接口(323)和天线(324),按压开关二(321)控制主控模块(3)启停,液晶显示屏(322)显示电量、工作状态及相关指令,充电接口(323)用于主控模块(3)充电,天线(324)用于连接和控制驱动模块(1),天线(324)还用于远程连接移动终端设备(5),远程操控检测机器人,无线传输检测数据。
10.一种如权利要求1-9任一项所述的复合材料板材超声波检测机器人的检测方法,其特征在于,包括如下步骤:
1)根据受检复合材料板材(4)选择相应型号相控阵探头(35);
2)将相控阵探头(35)安装在电动伸缩杆(36)前端,相控阵探头(35)的探头线插入主控模块机箱(31)接口;
3)将两根塑料导管(342)插入相控阵探头(35)的耦合剂接口,另一端与水箱(34)侧面耦合剂接口连接,将液体耦合剂加入水箱(34)内部,旋紧水箱盖(341);
4)依次按下按压开关二(321)和按压开关一(13),启动主控模块(3)和驱动模块(1);
5)将检测机器人与受检复合材料板材(4)平行放置,所有橡胶吸盘(18)与受检复合材料板材(4)表面平行接触,启动驱动模块(1)内部微型隔膜真空泵,检测机器人牢固吸附在受检复合材料板材(4)表面;
6)操控电动伸缩杆(36),将相控阵探头(35)按压在受检复合材料板材(4)表面,水箱(34)启动水泵将液体耦合剂通过塑料导管(342)泵送至相控阵探头(35)下部;
7)启动检测,主控模块(3)自左向右移动,相控阵模块(32)实时采集数据,通过天线(324)传输至移动终端设备(5);
8)主控模块(3)移动到导轨支架模块(2)最右端后,电动伸缩杆(36)沿轨道(37)向下移动,移动距离为相控阵探头(35)长度的一半,然后主控模块(3)沿导轨支架模块(2)向左移动;
9)主控模块(3)移动到导轨支架模块(2)最左端后,电动伸缩杆(36)沿轨道(37)向下移动,移动距离为相控阵探头(35)长度的一半,主控模块(3)沿导轨支架模块(2)向右移动;依次类推,直至该受检区域全部检测完成;
10)相控阵模块(32)实时采集检测数据,传输至移动终端设备(5),检测人员通过移动终端软件分析评定检测数据。
说明书
技术领域
[0001]本发明涉及一种智能化检测系统,尤其涉及一种复合材料板材超声波检测机器人及检测方法,属于工业检测设备制造领域。
背景技术
[0002]风机叶片是风力发电机组的重要组成部件,风机叶片采用玻璃纤维等复合材料通过热熔、热压等特殊工艺制成。其在制造过程中,由于工艺不良、质量把关不严等原因,易产生分层、脱胶等质量缺陷。在后期运行时,叶片承受旋转和风摆载荷,易致受力不均、整体结构不稳定,严重时会造成撕裂失效、叶片折断等事故发生,将会给机组带来重大安全风险和质量隐患。因此标准规范和设计文件对叶片质量检测均有详细规定,超声波检测技术就是复合板材内部质量检测的重要方法之一,检测需求量巨大。
[0003]目前,叶片超声波检测通常采用常规A超或相控阵检测方法,均由检测人员手持超声波探头实施检测,由于叶片尺寸巨大,检测人员通常要借助脚手架或者升降车实施手工检测,该方法存在安全风险,检测效率低,手持探头不能保证探头压力均匀,造成扫查过程中的检测灵敏度变化幅度较大,检测精度低,检测结果受人为操作方式影响大,且检测结果重复性较差。
发明内容
[0004]本发明所要解决的技术问题是针对现有技术存在的缺陷,提供一种复合材料板材超声波检测机器人及检测方法,实现对风机叶片等非金属复合材料板材的超声波全自动检测,解决检测实施困难、存在安全风险,以及手动超声波检测时存在的检测精度低等共性问题,提高检测质量和效率。
[0005]为解决这一技术问题,本发明提供了一种复合材料板材超声波检测机器人,包括驱动模块、导轨支架模块和主控模块,所述导轨支架模块为一方形框架,方形框架两侧为圆柱支架,所述驱动模块底部设有橡胶吸盘、设置在导轨支架模块两端,驱动模块通过内部微型隔膜真空泵控制橡胶吸盘的真空度,控制检测机器人吸附固定在受检复合材料板材表面;所述主控模块设置在圆柱支架上、可沿圆柱支架左右移动,驱动模块通过无线传输模块与主控模块建立联系,主控模块通过无线传输模块传输指令和数据,控制驱动模块实现水平和垂直两个方向移动;所述主控模块包括主控模块机箱、相控阵模块、相控阵探头、水箱和电动伸缩杆,主控模块机箱位于主控模块中部,相控阵模块和水箱位于主控模块机箱两侧,水箱为相控阵探头提供耦合剂,电动伸缩杆位于主控模块机箱下部、实现相控阵探头的起落;相控阵模块处理检测数据并将检测数据无线传输给移动终端设备进行数据分析、评判,实现对复合板材的超声波自动检测。
[0006]所述驱动模块包括驱动模块机箱、支臂、支柱和橡胶吸盘,两个支臂相互垂直设置,支臂两端通过圆柱形支柱各连接一个橡胶吸盘,驱动模块机箱内部设有无线传输模块和伺服电机模块一,伺服电机模块一前端设有直齿轮,支臂中部设有直齿导轨一,直齿导轨一与驱动模块机箱内部伺服电机模块一直齿轮相啮合;伺服电机通过正反方向转动,精确控制支臂的左右位移,两个相互垂直支臂的相对移动可实现机器人在受检复合材料板材表面的左右、上下移动,进而实现对复合板材的全面检测。
[0007]所述驱动模块机箱表面设有按压开关一、电源指示灯和USB接口。
[0008]所述导轨支架模块为由圆柱体型铝合金钢管焊接组成方形框架,其中长边的两根铝合金钢管为圆柱支架,短边的两根铝合金钢管中部设有两根垂直向下的支柱、用于与驱动模块连接;圆柱支架中部设有直齿导轨二,用于与主控模块的主控模块机箱连接。
[0009]所述主控模块机箱包括伺服电机模块二、伺服电机模块三和直齿导轨三,电动伸缩杆上部与伺服电机模块三相连,下部与相控阵探头相连,通过对电动伸缩杆的伸缩控制可实现相控阵探头的起落,并能为相控阵探头提供稳定压力;所述伺服电机模块二设置在主控模块机箱内部,伺服电机模块二前端设有直齿轮,直齿轮与导轨支架模块的直齿导轨二相啮合,通过控制伺服电机正反方向转动,控制主控模块在导轨支架模块上的的左右移动,从而实现相控阵探头在被检复合板材表面的往复扫查。
[0010]所述主控模块机箱中部设有两个导轨孔,与导轨支架模块圆柱支架尺寸相匹配,圆柱支架穿过导轨孔,使主控模块和导轨支架模块组合在一起。
[0011]所述主控模块机箱下部设有矩形轨道,电动伸缩杆上部凹型结构体嵌入轨道,凹型结构体上部设有驱动电机,驱动电机前端直齿轮与主控模块机箱下部直齿导轨三相啮合,通过控制伺服电机正反方向转动,控制电动伸缩杆在主控模块机箱下部轨道前后移动,从而实现相控阵探头在被检复合板材表面的往复扫查。
[0012]所述水箱上部设有圆形水箱盖,内部加入超声波液体耦合剂,通过水箱内部的压缩泵,将耦合剂经塑料导管泵送至相控阵探头下部,使相控阵探头与被检复合板材良好耦合。
[0013]所述相控阵模块外部设有按压开关二、液晶显示屏、充电接口和天线,按压开关二控制主控模块启停,液晶显示屏显示电量、工作状态及相关指令,充电接口用于主控模块充电,天线用于连接和控制驱动模块,天线还用于远程连接移动终端设备,远程操控检测机器人,无线传输检测数据。
[0014]本发明还提供了一种使用上述所述的复合材料板材超声波检测机器人的检测方法,其特征在于,包括如下步骤:
[0015]1)根据受检复合材料板材选择相应型号相控阵探头;
[0016]2)将相控阵探头安装在电动伸缩杆前端,相控阵探头的探头线插入主控模块机箱接口;
[0017]3)将两根塑料导管插入相控阵探头的耦合剂接口,另一端与水箱侧面耦合剂接口连接,将液体耦合剂加入水箱内部,旋紧水箱盖;
[0018]4)依次按下按压开关二和按压开关一,启动主控模块和驱动模块;
[0019]5)将检测机器人与受检复合材料板材平行放置,所有橡胶吸盘与受检复合材料板材表面平行接触,启动驱动模块内部微型隔膜真空泵,检测机器人牢固吸附在受检复合材料板材表面;
[0020]6)操控电动伸缩杆,将相控阵探头按压在受检复合材料板材表面,水箱启动水泵将液体耦合剂通过塑料导管泵送至相控阵探头下部;
[0021]7)启动检测,主控模块自左向右移动,相控阵模块实时采集数据,通过天线传输至移动终端设备;
[0022]8)主控模块移动到导轨支架模块最右端后,电动伸缩杆沿轨道向下移动,移动距离为相控阵探头长度的一半,然后主控模块沿导轨支架模块向左移动;
[0023]9)主控模块移动到导轨支架模块最左端后,电动伸缩杆沿轨道向下移动,移动距离为相控阵探头长度的一半,主控模块沿导轨支架模块向右移动;依次类推,直至该受检区域全部检测完成;
[0024]10)相控阵模块实时采集检测数据,传输至移动终端设备,检测人员通过移动终端软件分析评定检测数据。
[0025]有益效果:本发明专为风力发电机组叶片、树脂储罐等非金属复合材料大型板材超声波无损检测设计研发,模块化设计、无线操控,可快捷、高效地实现对非金属复合板材的全自动超声波检测,实时显示复合板材质量状况,检测速度快、检测精度高,是一套智能化检测系统。
附图说明
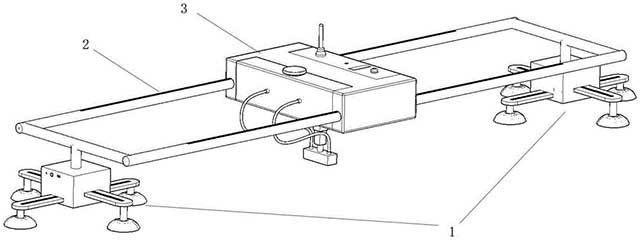
[0026]图1为本发明的整体结构示意图;
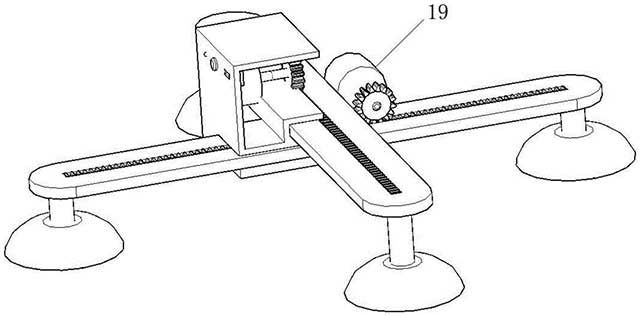
[0027]图2为本发明驱动模块的结构示意图;
[0028]图3为本发明驱动模块的内部结构示意图;
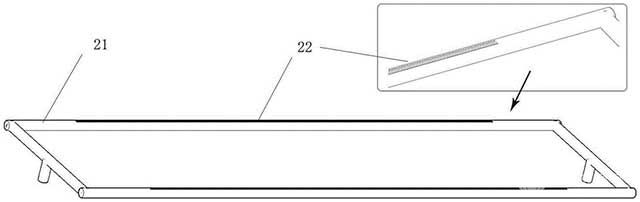
[0029]图4为本发明导轨支架模块的结构示意图;
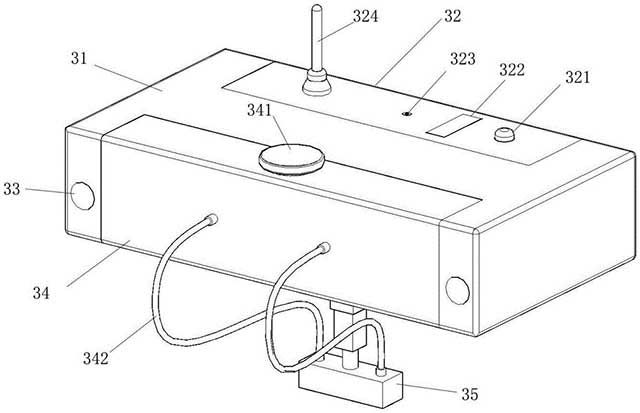
[0030]图5为本发明主控模块结的构示意图;
[0031]图6为本发明主控模块的另一视角示意图;
[0032]图7为本发明主控模块的内部结构示意图;
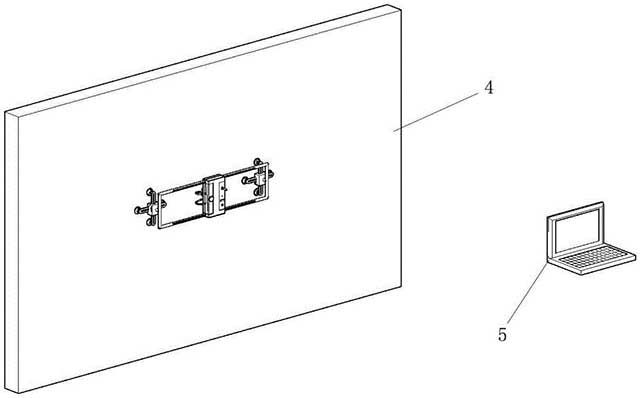
[0033]图8为本发明检测机器人现场应用示意图。
[0034]图中:1、驱动模块;2、导轨支架模块;3、主控模块;4、受检复合材料板材;5、移动终端设备;11、驱动模块机箱;12、电源指示灯;13、按压开关一;14、USB接口;15、支臂;16、直齿导轨一;17、支柱;18、橡胶吸盘;19、伺服电机模块一;21、圆柱支架;22、直齿导轨二;31、主控模块机箱;32、相控阵模块;33、导轨孔;34、水箱;35、相控阵探头;36、电动伸缩杆;37、轨道;311、伺服电机模块二;312、伺服电机模块三;313、直齿导轨三;321、按压开关二;322、液晶显示屏;323、充电接口;324、天线;341、水箱盖;342、塑料导管。
具体实施方式
[0035]下面结合附图及实施例对本发明做具体描述。
[0036]如图1-图8所示,本发明提供了一种复合材料板材超声波检测机器人,包括驱动模块1、导轨支架模块2和主控模块3,所述导轨支架模块2为一方形框架,方形框架两侧为圆柱支架21,所述驱动模块1底部设有橡胶吸盘18、设置在导轨支架模块2两端,导轨支架模块2两端的驱动模块1结构相同;驱动模块1通过内部微型隔膜真空泵控制橡胶吸盘18的真空度,抽出橡胶吸盘18内空气,控制检测机器人吸附固定在受检复合材料板材4表面,并可实现水平和垂直两个方向移动,泵入空气后,则橡胶吸盘18与受检复合材料板材4脱离,该吸附装置适用于无磁性复合板材表面检测设备的吸附固定,采用微型隔膜真空泵控制橡胶吸盘内部真空度,灵活实现了检测设备的吸附和脱离;所述主控模块3设置在圆柱支架21上、可沿圆柱支架21左右移动,驱动模块1通过无线传输模块与主控模块3建立联系,主控模块3通过无线传输模块传输指令和数据,控制驱动模块1实现水平和垂直两个方向移动;所述主控模块3包括主控模块机箱31、相控阵模块32、相控阵探头35、水箱34和电动伸缩杆36,主控模块机箱31位于主控模块3中部,相控阵模块32和水箱34位于主控模块机箱31两侧,水箱34为相控阵探头35提供耦合剂,电动伸缩杆36位于主控模块机箱31下部、实现相控阵探头35的起落;相控阵模块32处理检测数据并将检测数据无线传输给移动终端设备5进行数据分析、评判,实现对复合板材的超声波自动检测。
[0037]所述驱动模块1包括驱动模块机箱11、支臂15、支柱17和橡胶吸盘18,两个支臂15相互垂直设置,支臂15两端通过圆柱形支柱17各连接一个橡胶吸盘18,驱动模块机箱11内部设有无线传输模块和伺服电机模块一19,伺服电机模块一19前端设有直齿轮,支臂15中部设有直齿导轨一16,直齿导轨一16与驱动模块机箱11内部伺服电机模块一19前端的直齿轮相啮合;伺服电机通过正反方向转动,精确控制支臂15的左右位移,两个相互垂直支臂15的相对移动可实现机器人在受检复合材料板材4表面的左右、上下移动,进而实现对复合板材的全面检测。
[0038]所述驱动模块机箱11表面设有按压开关一13、电源指示灯12和USB接口14,按压开关一13用于驱动模块1的启停、电源指示灯12显示驱动模块1运行状态、USB接口14用于对驱动模块1充电,以及程序、数据的导入和导出。
[0039]所述导轨支架模块2为由圆柱体型铝合金钢管焊接组成方形框架,其中长边的两根铝合金钢管为圆柱支架21,短边的两根铝合金钢管中部设有两根垂直向下的支柱、用于与驱动模块1连接;圆柱支架21中部设有直齿导轨二22,用于与主控模块3的主控模块机箱31连接。
[0040]所述主控模块机箱31包括伺服电机模块二311、伺服电机模块三312和直齿导轨三313,电动伸缩杆36上部与伺服电机模块三312相连,下部与相控阵探头35相连,通过对电动伸缩杆36的伸缩控制可实现相控阵探头35的起落,并能为相控阵探头35提供稳定压力,保证相控阵探头与被检复合板材的稳定接触;所述伺服电机模块二311设置在主控模块机箱31内部,伺服电机模块二311前端设有直齿轮,直齿轮与导轨支架模块2的直齿导轨二22相啮合,通过控制伺服电机正反方向转动,控制主控模块3在导轨支架模块2上的的左右移动,从而实现相控阵探头35在被检复合板材表面的往复扫查。
[0041]所述主控模块机箱31中部设有两个导轨孔33,与导轨支架模块2圆柱支架21尺寸相匹配,圆柱支架21穿过导轨孔33,使主控模块3和导轨支架模块2组合在一起。
[0042]所述主控模块机箱31下部设有矩形轨道37,电动伸缩杆36上部凹型结构体内嵌入轨道37,凹型结构体上部设有驱动电机,驱动电机前端直齿轮与主控模块机箱31下部直齿导轨三313相啮合,通过控制伺服电机正反方向转动,控制电动伸缩杆36在主控模块机箱31下部轨道37前后移动,从而实现相控阵探头35在被检复合板材表面的往复扫查。
[0043]所述水箱34上部设有圆形水箱盖341,内部加入超声波液体耦合剂,通过水箱34内部的压缩泵,将耦合剂经塑料导管342泵送至相控阵探头35下部,使相控阵探头35与被检复合板材良好耦合。
[0044]所述相控阵模块32外部设有按压开关二321、液晶显示屏322、充电接口323和天线324,按压开关二321控制主控模块3启停,液晶显示屏322显示电量、工作状态及相关指令,充电接口323用于主控模块3充电,天线324用于连接和控制驱动模块1,天线还用于远程连接移动终端设备5,远程操控检测机器人,无线传输检测数据。
[0045]本发明还提供了一种使用上述所述的复合材料板材超声波检测机器人的检测方法,其特征在于,包括如下步骤:
[0046]1)根据受检复合材料板材4特性,依据检测标准要求选择相应型号相控阵探头35;
[0047]2)将相控阵探头35安装在电动伸缩杆36前端,相控阵探头35的探头线插入主控模块机箱31接口;
[0048]3)将两根塑料导管342插入相控阵探头35的耦合剂接口,另一端与水箱34侧面耦合剂接口连接,将液体耦合剂加入水箱34内部,旋紧水箱盖341,确保耦合剂不泄漏;
[0049]4)依次按下按压开关二321和按压开关一13,启动主控模块3和驱动模块1;打开移动终端设备5控制程序,通过天线324连接主控模块,然后操作移动终端设备5程序使主控模块3与两侧驱动模块1连接;操作移动终端设备5程序开始系统校准和软硬件测试,确保专利检测机器人各模块运转正常,移动终端设备5操作程序自检合格;
[0050]5)将检测机器人与受检复合材料板材4平行放置,所有橡胶吸盘18与受检复合材料板材4表面平行接触,启动驱动模块1内部微型隔膜真空泵,将橡胶吸盘18内部空气排空,使检测机器人牢固吸附在受检复合材料板材4表面;
[0051]6)操控电动伸缩杆36,将相控阵探头35按压在受检复合材料板材4表面,水箱34启动水泵将液体耦合剂通过塑料导管342泵送至相控阵探头35下部;
[0052]7)启动检测,主控模块3自左向右移动,相控阵模块32实时采集数据,通过天线324传输至移动终端设备5;
[0053]8)主控模块3移动到导轨支架模块2最右端后,电动伸缩杆36沿轨道37向下移动,移动距离为相控阵探头35长度的一半,然后主控模块3沿导轨支架模块2向左移动;
[0054]9)主控模块3移动到导轨支架模块2最左端后,电动伸缩杆36沿轨道37向下移动,移动距离为相控阵探头35长度的一半,主控模块3沿导轨支架模块2向右移动;依次类推,直至该受检区域全部检测完成;
[0055]10)相控阵模块32实时采集检测数据,传输至移动终端设备5,检测人员通过移动终端软件分析评定检测数据。
[0056]若要继续检测受检复合材料板材4上部区域:则将两侧驱动模块垂直方向的4个橡胶吸盘18泵入空气,使吸盘与板材脱离,然后操控两侧垂直方向支臂15同步向上移动;然后排空4个橡胶吸盘18内部空气,使吸盘吸附板材。然后将两侧水平方向的4个橡胶吸盘18泵入空气,使吸盘与板材脱离,然后操控专利检测机器人向上移动至目标区域;然后排空4个橡胶吸盘18内部空气,使吸盘吸附板材。
[0057]若要继续检测受检复合材料板材4下部区域,操作方法同上,只是移动方向相反。
[0058]若要继续检测受检复合材料板材4左部区域:则将两侧驱动模块水平方向的4个橡胶吸盘18泵入空气,使吸盘与板材脱离,然后操控两侧水平方向支臂15同步向左移动;然后排空4个橡胶吸盘18内部空气,使吸盘吸附板材。然后将两侧垂直方向的4个橡胶吸盘18泵入空气,使吸盘与板材脱离;然后操控专利检测机器人向左移动至目标区域;然后排空4个橡胶吸盘18内部空气,使吸盘吸附板材。
[0059]若要继续检测受检复合材料板材4右部区域,操作方法同上,只是移动方向相反。
[0060]重复上述步骤,直至受检区域焊接接头检测完成,检测任务结束。
[0061]本发明主控模块高度集成,各模块在程序软件的集中控制下,可精确实现超声波探头良好耦合,实施检测和数据分析全部流程;吸附控制装置尤其适用于无磁性复合板材及光滑的金属板材表面检测设备的吸附固定,采用微型隔膜真空泵,通过控制橡胶吸盘内部真空度,可灵活实现检测设备的吸附和脱离,工艺适用性好,通用性强,经济效益高;主控模块和驱动模块可实现无线连接,主控模块和移动终端设备也通过无线连接,在移动端进行数据分析评判和专利检测机器人的远程操控,可实现自动化检测;可通过驱动机构双轴位移控制系统将检测机器人移动到目标区域,通过主控机构在导轨支架模块上的左右移动,和电动伸缩杆在主控模块下部轨道的前后移动,可实现对目标区域的全覆盖精确检测。
[0062]本发明结构紧凑,各模块装置体积小巧,且为电池供电,方便携带,适用范围广,尤其适用于大型复合板材、叶片在役等复杂环境检测,安全可靠;采用模块化设计,各模块拆装方便,便于后期维修和升级,制造成本和使用成本低;检测机器人采用超声波原理,无辐射危害,数据响应和处理速度快,可与其它施工工作同步进行,检测效率高、成本低;本发明具有无线传输功能,检测人员可在笔记本电脑或智能手机端进行远程无线操控,无需检测专业人员攀爬脚手架或使用升降车实施检测,检测成本和安全风险低,参数控制精准,可快捷、高效地实现对非金属复合板材的全自动超声波检测,实时显示复合板材质量状况,检测速度快,检测数据可实时分析,显示直观,数据判读便捷,检测精度高。
[0063]本发明上述实施方案,只是举例说明,不是仅有的,所有在本发明范围内或等同本发明的范围内的改变均被本发明包围。
说明书附图(8)


声明:
“复合材料板材超声波检测机器人及检测方法” 该技术专利(论文)所有权利归属于技术(论文)所有人。仅供学习研究,如用于商业用途,请联系该技术所有人。
我是此专利(论文)的发明人(作者)
 862
编辑:北方有色网
来源:山东丰汇工程检测有限公司
862
编辑:北方有色网
来源:山东丰汇工程检测有限公司



 咨询细节
咨询细节














































































 2026年08月06日 ~ 08日
2026年08月06日 ~ 08日 




















