权利要求书: 1.基于深度学习和声发射的风机叶片损伤两步定位方法,其特征在于,包括步骤:步骤一:建立由获取的监测数据组成的风机叶片结构损伤声发射数据集;
步骤二:特征提取:从监测数据中提供数据特征,数据特征包括声发射信号的到达时间差特征、信号峰值幅度特征和信号到达峰值的时间特征;
步骤三:结构损伤区域分类;
用声发射信号的到达时间差特征形成的训练集与验证集,对基于长短期记忆深度学习神经网络建立的风机叶片结构损伤区域定位模型进行训练,得到最优的损伤区域定位模型;
将声发射信号的到达时间差特征形成的测试集的数据输入最优的损伤区域定位模型,由最优的损伤区域定位模型处理后输出结构损伤区域分类结果;
步骤四:损伤坐标定位
将声发射信号的到达时间差特征、信号峰值幅度特征和信号到达峰值的时间特征形成训练集与验证集,对基于长短期记忆深度学习神经网络和卷积神经网络建立的风机叶片结构损伤坐标定位模型进行训练,得到最优的损伤坐标定位模型;
将声发射信号的到达时间差特征、信号峰值幅度特征和信号到达峰值的时间特征形成的测试集的数据输入最优的损伤坐标定位模型,由最优的损伤坐标定位模型处理后输出损伤坐标定位结果。
2.根据权利要求1所述基于深度学习和声发射的风机叶片损伤两步定位方法,其特征在于,所述的监测数据获取时,是在风机叶片上选定有待监测区域布置
传感器网络,在待监测区域建立划分采样网格,在划分采样网格点实施断
铅试验声发射源,收集断铅试验声发射源发出的声发射信号,获取监测数据。
3.根据权利要求1所述基于深度学习和声发射的风机叶片损伤两步定位方法,其特征在于,所述的声发射信号的到达时间差通过传感器之间的到达时间差 确定;
,
对于一对传感器,声发射波的实际到达时刻 和 的时间差和根据声发射信号的首达时间 和 计算得到的到达时间差是相同的。
4.根据权利要求3所述基于深度学习和声发射的风机叶片损伤两步定位方法,其特征在于,所述声发射信号的首达时间根据赤池信息准则确定,对任一传感器信号:,
其中,var表示计算方差, 是由选定窗口确定的时间序列信号, 是 信号的时间长度, 是遍历 中的每个时刻, 值最小时即为声发射信号的首达时间。
5.根据权利要求1所述基于深度学习和声发射的风机叶片损伤两步定位方法,其特征在于,所述损伤区域定位模型依次包含一个带有注意力机制的双向LSTM层、一个池化层、一个带有RELU激活函数的全连接层、一个带有RELU激活函数的dropout丢弃层以及一个全连接的分类层;所述分类层用于获得损伤所在结构,进行结构损伤区域分类。
6.根据权利要求5所述基于深度学习和声发射的风机叶片损伤两步定位方法,其特征在于,所述损伤区域定位模型的训练过程中,采用交叉熵损失函数训练模型中的参数,交叉熵损失函数被最小化,其公式为:,
其中, 表示训练集中样本的大小, 和 分别表示实际和预测的损伤区域;
训练过程中,反向传播算法被用来更新模型的参数,以最小化损失函数;随机梯度下降法SGD被用于优化参数。
7.根据权利要求1所述基于深度学习和声发射的风机叶片损伤两步定位方法,其特征在于,所述损伤坐标定位模型依次由带有注意力机制的LSTM层、批量归一化层、三个依次连接的一维卷积神经网络层、平铺Flatten层、两个依次连接的全连接层和回归层组成;所述带有注意力机制的LSTM层、一维卷积神经网络层、平铺Flatten层以及全连接层的输出各自连接一个RELU层;所述平铺Flatten层用于把多维输入转化为一维数据,以便从一维卷积神经网络层过渡到全连接层层;两个全连接层层和一个回归层被用来估计损伤位置坐标。
8.根据权利要求1所述基于深度学习和声发射的风机叶片损伤两步定位方法,其特征在于,所述损伤坐标定位模型的训练过程中,采用基于反向传播算法的权重更新方法来优化模型参数,使用均方根误差RMSE作为损失函数,计算公式为:,
其中,是样本的总数, 为预测的坐标值, 为实际的坐标值。
9.根据权利要求1所述基于深度学习和声发射的风机叶片损伤两步定位方法,其特征在于,采用对应的测试集上的平均定位距离误差MLE,误差方差,最小误差,最大误差和以及准确率来评估所述损伤坐标定位模型性能;
其中,平均定位距离误差MLE和准确率分别表示为:
,
其中,( , )为结构损伤位置原坐标,( )为结构损伤位置预测坐标;
准确率= ,
其中, 是待监测的区域的最长边的边长。
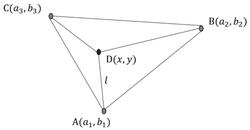
说明书: 基于深度学习和声发射的风机叶片损伤两步定位方法技术领域[0001] 本发明涉及风机叶片损伤定位技术领域,特别是涉及一种基于深度学习和声发射的风机叶片损伤两步定位方法。背景技术[0002] 对风能的利用已经逐渐成为能源转型的关键一环。风机叶片是风力发电机捕获风能的关键部件,其结构复杂且长期在恶劣环境中运行,具有高技术、高成本、高故障率等特点。风机叶片结构具有多种损伤形式,包括分层、脱粘等层间损伤和纤维断裂、基体压缩等层内损伤,这些初始损伤在复杂恶劣的运行环境下是结构安全的重大威胁,甚至迅速导致结构坍塌。风机叶片的结构健康监测,尤其是结构损伤定位,已经成为风电技术中亟待解决的关键问题。[0003] 传统上通常采用目视法,超声波检测,热成像或者机器视觉等方法进行结构损伤定位,然而这些方法仅能定期检测损伤,无法对结构进行长期损伤监测。检测程序一般也较为繁琐,需要运维人员到现场实施,有的检测方法还需要风机停机,大大损害了风场收益。[0004] 此外,对可及性较差区域的风机进行检测时需要耗费大量的经济成本。传统上还有基于振动监测或声学信号监测的风机叶片损伤定位方法。振动监测方法通过加速度传感器测量风机叶片各个方向的振动响应,结合振动模态方法分析异常位置,从而实现结构损伤定位。然而振动监测往往仅对大尺度结构损伤敏感,对结构小损伤或初始损伤无法有效定位监测。梅东升等采用声学信号方法进行叶片损伤定位监测,开发了一种基于三个声学信号测量传感器排布的监测方案,如图1所示,三个传感器A(a1,b1)、B(a2,b3)、Ca3,b3)构成一个三角形,用于监测三角内部的区域的损伤D(x,y)。根据不同传感器接收到信号的到达时间差、信号传播速度和传感器间距等信息可以得到损伤D和传感器之间的距离l,从而实现损伤定位。该方法假设信号传播速度恒定,且只能监测所布置的三个传感器内部区域的损伤,监测区域小,传感器布置复杂,定位误差较大。[0005] 声发射是风机叶片结构健康监测的极具潜力的一种监测技术。作为一种被动监测技术,声发射传感器将结构损伤释放的高频弹性波转换为电信号,即声发射波。声发射波中包含结构损伤的大量信息,并且对结构微小损伤非常敏感,可以用于微小初始损伤的检测、定位、分类、损伤程度判断等。尤其是,在结构损伤的初始阶段和损伤发展阶段,声发射信号特别明显,利用声发射传感器拾取声发射波,并通过声发射波判断损伤的位置即是声发射源定位技术,目前已经广泛用于桥梁、储罐、航空航天、建筑物等的结构损伤定位。但声发射技术在风机叶片结构上的应用仍然很有限。常见的声发射源定位方法主要有:波束成形方法、时间反转等方法,基于数据驱动的方法如Delta?T方法。前两个方法适用于均质薄板结构,但计算复杂、定位效果不佳、精确度受传感器阵列的布置影响较大;Delta?T方法受噪声干扰较大,操作复杂,精度较低。发明内容[0006] 本发明的目的是针对现有技术中的问题,而提供一种基于深度学习和声发射的风机叶片损伤两步定位方法。[0007] 本发明是这样实现的,一种基于深度学习和声发射的风机叶片损伤两步定位方法,包括步骤:[0008] 步骤一:建立由获取的监测数据组成的风机叶片结构损伤声发射数据集;[0009] 步骤二:特征提取:从监测数据中提供数据特征,数据特征包括声发射信号的到达时间差特征、信号峰值幅度特征和信号到达峰值的时间特征;[0010] 步骤三:结构损伤区域分类;[0011] 用声发射信号的到达时间差特征形成的训练集与验证集,对基于长短期记忆深度学习神经网络建立的风机叶片结构损伤区域定位模型进行训练,得到最优的损伤区域定位模型;[0012] 将声发射信号的到达时间差特征形成的测试集的数据输入最优的损伤区域定位模型,由最优的损伤区域定位模型处理后输出结构损伤区域分类结果;[0013] 步骤四:损伤坐标定位[0014] 将声发射信号的到达时间差特征、信号峰值幅度特征和信号到达峰值的时间特征形成训练集与验证集,对基于长短期记忆深度学习神经网络和卷积神经网络建立的风机叶片结构损伤坐标定位模型进行训练,得到最优的损伤坐标定位模型;[0015] 将声发射信号的到达时间差特征、信号峰值幅度特征和信号到达峰值的时间特征形成的测试集的数据输入最优的损伤坐标定位模型,由最优的损伤坐标定位模型处理后输出损伤坐标定位结果。[0016] 其中,所述的监测数据获取时,是在风机叶片上选定有待监测区域布置传感器网络,在待监测区域建立划分采样网格,在划分采样网格点实施断铅试验声发射源,收集断铅试验声发射源发出的声发射信号,获取监测数据。[0017] 其中,所述的声发射信号的到达时间差通过传感器之间的到达时间差 确定;,
[0018] 对于一对传感器,声发射波的实际到达时刻 和 的时间差和根据声发射信号的首达时间 和 计算得到的到达时间差是相同的。
[0019] 其中,所述声发射信号的首达时间根据赤池信息准则确定,对任一传感器信号:,
[0020] 其中,var表示计算方差, 是由选定窗口确定的时间序列信号, 是 信号的时间长度, 是遍历 中的每个时刻, 值最小时即为声发射信号的首达时间。[0021] 其中,所述损伤区域定位模型依次包含一个带有注意力机制的双向LSTM层、一个池化层、一个带有RELU激活函数的全连接层、一个带有RELU激活函数的dropout丢弃层以及一个全连接的分类层;所述分类层用于获得损伤所在结构,进行结构损伤区域分类。[0022] 其中,所述损伤区域定位模型的训练过程中,采用交叉熵损失函数训练模型中的参数,交叉熵损失函数被最小化,其公式为:[0023] ,[0024] 其中, 表示训练集中样本的大小, 和 分别表示实际和预测的损伤区域;[0025] 训练过程中,反向传播算法被用来更新模型的参数,以最小化损失函数;随机梯度下降法SGD被用于优化参数。[0026] 其中,所述损伤坐标定位模型依次由带有注意力机制的LSTM层、批量归一化层、三个依次连接的一维卷积神经网络层、平铺Flatten层、两个依次连接的全连接层和回归层组成;所述带有注意力机制的LSTM层、一维卷积神经网络层、平铺Flatten层以及全连接层的输出各自连接一个RELU层;所述平铺Flatten层用于把多维输入转化为一维数据,以便从一维卷积神经网络层过渡到全连接层层;两个全连接层层和一个回归层被用来估计损伤位置坐标。[0027] 其中,所述损伤坐标定位模型的训练过程中,采用基于反向传播算法的权重更新方法来优化模型参数,使用均方根误差RMSE作为损失函数,计算公式为:[0028] ,[0029] 其中,是样本的总数, 为预测的坐标值, 为实际的坐标值。[0030] 其中,采用对应的测试集上的平均定位距离误差MLE,误差方差,最小误差,最大误差和以及准确率来评估所述损伤坐标定位模型性能;[0031] 其中,平均定位距离误差MLE和准确率分别表示为:[0032] ,[0033] 其中,( , )为结构损伤位置原坐标,( )为结构损伤位置预测坐标;[0034] 准确率= ,[0035] 其中, 是待监测的区域的最长边的边长。[0036] 本发明首先采用深度学习方法对风力发电机叶片的异质结构进行定位,确定损伤所在的区域,然后再确定损伤位置的准确坐标,摆脱了繁琐的解析方程的复杂求解过程,实施简单,精度较高,具有广泛的适用性。[0037] 本发明使用被动监测声发射传感器收集风机叶片结构损伤产生的高频弹性声发射波,能够快速定位损伤的准确位置,有效提高了风机叶片结构损伤定位的精度,能显著提升结构损伤定位精准度和计算效率,非常适用于风机叶片结构长期损伤定位监测。附图说明[0038] 图1为现有技术下一种监测方案的三个声学信号测量传感器排布示意图。[0039] 图2为本发明的基于深度学习和声发射的风机叶片损伤两步定位方法流程图。[0040] 图3为本发明提取的声发射信号特征示意图。[0041] 图4为本发明的基于长短期记忆深度学习神经网络(LSTM)构建的风机叶片结构损伤区域定位模型。[0042] 图5为本发明的基于长短期记忆深度学习神经网络(LSTM)和卷积神经网络(CNN)构建的风机叶片结构损伤坐标定位模型。[0043] 图6为本发明的风机叶片定位区域结构的示意图。[0044] 图7为本发明的风机叶片结构定位区域的传感器布置示意图。[0045] 图8为本发明在实施例上的区域定位结果的混淆矩阵示意图。具体实施方式[0046] 为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。[0047] 由于基于深度学习的方法在监测领域受到了广泛的关注。而且深度学习框架强大的特征提取能力使得有可能对复杂结构中的损伤区进行分类并预测损伤的位置。越来越多的研究也表明了深度学习的广泛的适用性。因此,本发明基于此,开发新的基于深度学习的风机叶片结构损伤定位方法。[0048] 本发明实施例的提供的一种基于深度学习和声发射的风机叶片损伤两步定位方法,充分利用声发射传感器网络监测信号所得到的到达时间差和信号的时域特征,首先确定损伤所在区域,然后确定损伤具体位置坐标。[0049] 具体实施例包括步骤:[0050] 步骤一:建立风机叶片结构损伤声发射数据集。[0051] 风机叶片结构损伤声发射数据集由获取的监测数据组成的,具体的,建立风机叶片结构损伤声发射数据集时,可以是针对风机叶片典型异质结构,在选定的待监测区域布置传感器网络,在待监测的区域建立划分采样网格,通过在划分采样网格点实施H?N源(断铅试验声发射源),以获取监测数据。[0052] 步骤二:特征提取:从监测数据中提供数据特征。[0053] 根据本发明提出的两步损伤定位方法中两阶段任务的复杂度不同,提取不同的信号特征作为对应的深度学习模型的输入。[0054] 所提取的不同信号特征数据包括声发射信号的到达时间差特征,声发射信号信号峰值幅度(PA)由模型和声发射信号信号到达峰值的时间(TP)由模型。特征提取示意图如图3所示。
[0055] 一是针对风机叶片结构损伤区域分类任务,提取声发射信号的到达时间差(TDOA)作为所建立的深度学习模型的输入特征。[0056] 虽然声发射信号的生成的准确时刻难以确定,但传感器之间的到达时间差 是确定的。对于一对传感器,声发射波的实际到达时刻 和 的时间差和根据声发射信号的首达时间 和 计算得到的到达时间差是相同的,即
[0057] ,,[0058] 声发射信号的首达时间根据赤池信息准则确定,对任一传感器信号:,
[0059] 其中,var表示计算方差, 是由选定窗口确定的时间序列信号, 是 信号的时间长度, 是遍历 中的每个时刻,计算得到的 值最小时即代表信号的首达时间。[0060] 二是针对损伤坐标定位任务,声发射(AE)信号的时域特性受传播特性的影响很大,包括反射、传输和衰减,这对异质结构来说是不可忽视的。[0061] 除了声发射信号的到达时间差(TDOA)之外,还提取了两个新的特征来更精确地定位损伤位置的坐标。两个新特征包括信号峰值幅度(PA)和信号到达峰值的时间(TP),它们有望消除AE信号的传播特性的影响。[0062] 步骤三:结构损伤区域分类。[0063] 将提取的声发射信号到达时间差特征,按照预设比例划分为训练集、验证集和测试集,同时基于长短期记忆深度学习神经网络(LSTM)开发风机叶片结构损伤区域定位模型,利用训练集和验证集中的数据对所搭建的深度学习模型进行训练,根据逐步优化策略对模型中的超参数继续进行优化,得到用于识别损伤所在结构的最优的损伤区域定位模型(图1中的深度学习网络1),使用测试集评估最优的损伤区域定位模型的性能,得到结构损伤区域分类的结果。[0064] 其中,所述损伤区域定位模型包含一个带有注意力机制的双向LSTM层,意味着对强特征赋予较大的权重,对弱特征赋予较小的权重,甚至是零权重。[0065] 有一个池化层用于保留主要特征,同时减少参数计算量,防止过拟合问题,提高模型的泛化能力。[0066] 有一个带有RELU激活函数的全连接层,用于避免梯度扩散问题。激活函数用来表示输入和输出之间的非线性关系,从而增强网络的能力。[0067] 为了提高泛化能力和防止过度拟合,还增加了一个dropout丢弃层。[0068] 最后,有一个全连接的分类层来对损伤区域进行分类。所述损伤区域定位模型如图4所示。[0069] 为了训练损伤区域定位模型中参数,交叉熵损失函数被最小化,其公式为:[0070] ,[0071] 其中, 表示训练集中样本的大小, 和 分别表示实际和预测的损伤区域。[0072] 模型的训练过程中,反向传播算法被用来更新模型的参数,以最小化损失函数。随机梯度下降法(SGD)被用于优化参数。这种方法适合分类任务,因为它对梯度的要求很低,而且它的计算收敛性更强,可以加速学习过程。[0073] 步骤四:损伤坐标定位[0074] 将提取的声发射信号到达时间差特征、信号峰值幅度特征和信号到达峰值的时间特征所组成的数据集,按照预设比例划分为训练集、验证集和测试集。同时,基于长短期记忆深度学习神经网络(LSTM)和卷积神经网络(CNN)的风机叶片结构损伤坐标定位模型。利用训练集和验证集中的数据对所搭建的深度学习模型进行训练,根据逐步优化策略对模型中的超参数继续进行优化,得到最优的损伤坐标定位模型(图1中的深度学习网络2)以识别损伤位置坐标;使用对应的测试集评估所开发的损伤坐标定位模型的性能,得到损伤位置坐标,从而得到结构损伤坐标预测的结果。[0075] 其中,所述的损伤坐标定位模型依次由带有注意力机制的LSTM层、批量归一化层、三个一维卷积神经网络层(CNN层)、平铺层(Flatten层)、全连接层(FC层)和回归层组成。[0076] 其中,所述的损伤坐标定位模型的核心是一个LSTM层和三个CNN层。批量归一化层用于减少内部协变量偏差,从而加速深度网络训练。平铺层(Flatten层)即把多维输入转化为一维数据,以便从卷积层过渡到FC层。[0077] 两个FC层和一个回归层被用来估计损伤位置的坐标。[0078] 所述损伤坐标定位深度学习模型如图5所示。[0079] 模型训练过程中,采用基于反向传播算法的权重更新方法来优化模型参数。使用均方根误差RMSE作为损失函数,计算公式为:[0080] ,[0081] 其中,是样本的总数, 为预测的坐标值, 为实际的坐标值。[0082] 表1损伤坐标定位模型网络层及超参数[0083] 关于损伤坐标定位模型评估,采用测试集上的平均定位距离误差(MLE),误差方差,最小误差,最大误差和准确率被用来评估所提议的模型的性能。[0084] 平均定位距离误差(MLE)和准确率分别表示为:[0085] ,[0086] 其中,( , )为结构损伤位置原坐标,( )为结构损伤位置预测坐标。[0087] 准确率= ,[0088] 其中, 是要监测的区域的最长边的边长。[0089] 下面,以一款1MW的风机叶片监测为例进行说明:[0090] 参见图6所示,本实施例的对象为一款1MW的风机叶片,根据统计,其叶根区域、沿叶片长度方向离叶根30%和70%叶片长度的区域以及叶片尖端等是风力发电机叶片容易受到各种结构破坏的区域。[0091] 在本实施例中,进行的测试是在离叶根70%叶片长度附近的区域进行的,所关注的区域是一个T形的复合异质结构,由翼梁帽10,前缘板20和剪切腹板30组成。测试在300mm×300mm×300mm的范围内进行。[0092] 传感器被安排在结构中间以监测更大的区域,每个部件上有三个传感器。翼梁帽10上布置传感器1,传感器2,传感器3,在前缘板20布置传感器4、传感器5、传感器6,在剪切腹板30上布置传感器7,传感器8、传感器9,布置的传感器距离异质边界100毫米,相邻传感器间距为80毫米。在异质结构中构建了一个间距为10毫米的网格,如图6和图7所示。
[0093] 在网格点实施H?N源(断铅试验声发射源),获取监测数据。三个部件(翼梁帽10,前缘板20和剪切腹板30)上各进行了841组试验,共进行2523组断铅试验。[0094] 该实施例中,进行结构损伤区域分类是针对三个部件的分类任务,目标是判断结构损伤所在区域。获取的特征是三个部件中的九个传感器组成的传感器网络的每对传感器之间的到达时间差。最终获取的特征的维度是(36,2523)。即共2523个损伤位置,每个损伤位置的特征数量是36个。[0095] 该实施例中,所述的损伤坐标定位是在结构损伤区域定位的基础上进行的,在确定了结构损伤区域后,就可针对所在的结构损伤区域进行损伤坐标定位。[0096] 针对三个部件分别获取特征,所获取的特征是每个部件中三个传感器组成的传感器网络的每对传感器之间的到达时间差,以及三个传感器收集到的时间序列信号的信号峰值幅度(PA)和信号到达峰值的时间(TP),最终获取的特征的维度是(6,841)。即每个部件涉及841个损伤位置,每个损伤位置特征数量6个。[0097] 本实施例中,在风机叶片结构损伤区域定位模型的训练、验证以及测试中,所用的训练集、验证集和测试集的比例为3:1:1。[0098] 利用训练集和验证集中的数据对搭建的风机叶片结构损伤区域定位模型训练,根据逐步优化策略对模型中的超参数进行优化,得到最优的风机叶片结构损伤区域定位模型。[0099] 在风机叶片结构损伤区域定位模型中,LSTM的隐藏单元为512,dropout率为0.1,训练的批次,即batch大小为64,训练轮次为500。初始学习率被设定为0.5,并在训练期间以0.5的系数递减。
[0100] 如图8所示为区域定位结果的混淆矩阵示意图。[0101] 图8的结果显示测试的准确性为100%。所有的损伤区都能被所述风机叶片结构损伤区域定位深度学习模型成功分类。[0102] 本实施例中,在损伤坐标定位中,用于风机叶片结构损伤坐标定位模型的训练、验证以及测试的训练集、验证集和测试集的比例为3:1:1。[0103] 损伤定位结果列于表2,本发明的方法在所有三个组件上都显示出同样的优良的定位性能和鲁棒性,准确率超过97%。[0104] 表2损伤坐标定位结果[0105] 实施例的结果表明,所提出的方法可以准确地定位风机叶片的损伤位置,第一阶段结构损伤区域分类的准确率为100%,第二阶段损伤位置坐标定位的准确率为97%以上。[0106] 需要说明的是,本发明实施例所提出的结构损伤定位技术是一种数据驱动的结构损伤定位方法,在风机叶片的任何区域进行验证试验都是可以实现的,不限于所给出的实施例。[0107] 以上所述仅是本发明的优选实施方式,应当指出的是,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
声明:
“基于深度学习和声发射的风机叶片损伤两步定位方法” 该技术专利(论文)所有权利归属于技术(论文)所有人。仅供学习研究,如用于商业用途,请联系该技术所有人。
我是此专利(论文)的发明人(作者)
 779
编辑:管理员
来源:天津大学
779
编辑:管理员
来源:天津大学



 咨询细节
咨询细节










































































 2026年08月06日 ~ 08日
2026年08月06日 ~ 08日 















