权利要求书: 1.一种PCB板单相机光学检测机器人,其特征在于,包括:支架(1),所述支架(1)上设置有对PCB板进行拍摄的摄像头(2);
摄像区,位于所述摄像头(2)下方,用于所述摄像头(2)对流经所述摄像区的PCB板进行拍摄;
移动装置(3),所述移动装置(3)设在所述支架(1)上,用于驱动所述摄像头(2)在PCB板流经路线上的横向、纵向运动。
2.根据权利要求1所述的PCB板单相机光学检测机器人,其特征在于:所述移动装置(3)包括与所述支架(1)固定连接的安装板(31),所述安装板(31)上设有呈对称布置的直线导轨(32),所述直线导轨(32)之间设有主动同步带轮(33)以及与所述安装板(31)活动连接的从动同步带轮(34),所述主动同步带轮(33)与所述从动同步带轮(34)通过同步带(35)啮合联动,所述主动同步带轮(33)通过安装在所述安装板(31)上的电机(36)驱动,所述移动装置(3)上安装有固定板(4),所述固定板(4)用于安装所述摄像头(2),所述固定板(4)与所述同步带(35)固定连接,所述固定板(4)与所述直线导轨(32)中的滑块固定连接;
所述固定板(4)设有多个均布的安装孔(41),所述摄像头(2)通过所述安装孔(41)与所述固定板(4)固定连接。
3.根据权利要求1所述的PCB板单相机光学检测机器人,其特征在于:所述支架(1)上端设有多个挡板(5),所述挡板(5)与所述支架(1)形成挡光腔体,所述摄像头(2)位于所述挡光腔体内。
4.根据权利要求1所述的PCB板单相机光学检测机器人,其特征在于:所述摄像头(2)移动时与PCB板流经路线的夹角呈45°-89°。
说明书: PCB板单相机光学检测机器人技术领域[0001] 本实用新型涉及光学检测机器人技术器领域,具体是一种PCB板单相机光学检测机器人。
背景技术[0002] PCB(PrintedCircuitBoard),中文名称为印制电路板,又称印刷线路板,是重要的电子部件,是电子元器件的支撑体,是电子元器件电气连接的载体。
[0003] 由于PCB板生产过程中会产生很多的缺陷,为保证生产的质量,印刷电路板的多个生产步骤中必须加入质量检测。光学检测就是其中一种优秀的质量检测方法,一般通过移
动PCB板来进行光学检测;PCB板在停板过程中会出现元器件偏移、掉落等现象,而且传统的
摄像头由于视野大,拍摄的图像不清晰。
实用新型内容
[0004] 本实用新型要解决的技术问题是:解决传统的PCB板进行光学检测时不仅会因停板导致元器件偏移、掉落,而且摄像头拍摄的图像也不清晰的技术问题。
[0005] 本实用新型提供一种PCB板单相机光学检测机器人,包括:[0006] 支架,所述支架上设置有对PCB板进行拍摄的摄像头;[0007] 摄像区,位于所述摄像头下方,用于所述摄像头对流经所述摄像区的PCB板进行拍摄;
[0008] 移动装置,所述移动装置设在所述支架上,用于驱动所述摄像头在PCB板流经路线上的横向、纵向运动。
[0009] 摄像头下方设置有穿插摄像区的流水线轨道,流水线轨道用于传送PCB板,通过移动装置驱动摄像头,使摄像头对PCB板进行拍摄,摄像头在PCB板流经路线上进行横向、纵向
运动,使流水线轨道工作时可以始终处于运行状态,避免停板导致元器件偏移、掉落,而且
缩小了摄像头的视野,拍摄的图像更加清晰。
[0010] 进一步的,所述移动装置包括与所述支架固定连接的安装板,所述安装板上设有呈对称布置的直线导轨,所述直线导轨之间设有主动同步带轮以及与所述安装板活动连接
的从动同步带轮,所述主动同步带轮与所述从动同步带轮通过同步带啮合联动,所述主动
同步带轮通过安装在所述安装板上的电机驱动,所述移动装置上安装有固定板,所述固定
板用于安装所述摄像头,所述固定板与所述同步带固定连接,所述固定板与所述直线导轨
中的滑块固定连接;
[0011] 所述固定板设有多个均布的安装孔,所述摄像头通过所述安装孔与所述固定板固定连接。
[0012] 通过电机驱动主动同步带轮的方式带动摄像头移动,并通过直线导轨进行导向,不仅结构简单,而且精度高;通过更换安装孔的方式改变摄像头在竖直方向的安装位置,操
作简单,成本低。
[0013] 进一步的,所述支架上端设有多个挡板,所述挡板与所述支架形成挡光腔体,所述摄像头位于所述挡光腔体内。挡板将外部的光线隔离,避免摄像头受到外界光线干扰影响
拍摄质量。
[0014] 进一步的,所述摄像头移动时与PCB板流经路线的夹角呈45°-89°。如此设置,实现摄像头在PCB板流经路线上进行横向、纵向运动,结构简单。
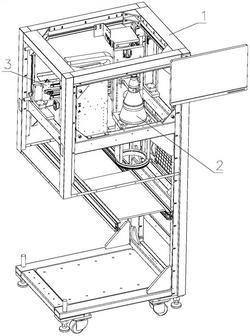
附图说明[0015] 下面结合附图和实施例对本实用新型进一步说明。[0016] 图1是本实用新型的结构示意图;[0017] 图2是本实用新型隐藏挡板的结构示意图;[0018] 图3是本实用新型的俯视图;[0019] 图4是移动装置的结构示意图;[0020] 图5是图3中A处的放大图;[0021] 图6是移动装置另一个视角并隐藏安装板的结构示意图;[0022] 图中:1、支架;2、摄像头;3、移动装置;4、固定板;5、挡板;31、安装板;32、直线导轨;33、主动同步带轮;34、从动同步带轮;35、同步带;36、电机;41、安装孔。
具体实施方式[0023] 现在结合附图对本实用新型作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本实用新型的基本结构,因此其仅显示与本实用新型有关的构成。
[0024] 如图1和图2所示,本实用新型是一种PCB板单相机光学检测机器人,包括支架1,支架1上端设有摄像头2以及驱动摄像头2的移动装置3,摄像头2下方设有摄像区以及穿插摄
像区的流水线轨道,摄像头2用于拍摄流水线轨道上的PCB板;如图3所示,摄像头2的移动方
向与流水线轨道设有84°的夹角,实现摄像头2在PCB板流经路线上进行横向、纵向运动;
[0025] 如图4、图5和图6所示,移动装置3包括与支架1固定连接的安装板31,安装板31上设有呈对称布置的直线导轨32,直线导轨32之间设有主动同步带轮33以及与安装板31活动
连接的从动同步带轮34,主动同步带轮33与从动同步带轮34通过同步带35啮合联动,主动
同步带轮33通过安装在安装板31上的电机36驱动,移动装置3上安装有固定板4,固定板4用
于安装摄像头2,固定板4与同步带35固定连接,固定板4与直线导轨32中的滑块固定连接;
[0026] 固定板4设有多个均布的安装孔41,摄像头2通过安装孔41与固定板4固定连接;[0027] 通过电机36驱动主动同步带轮33的方式带动摄像头2移动,并通过直线导轨32进行导向,不仅结构简单,而且精度高;通过更换安装孔41的方式改变摄像头2在竖直方向的
安装位置,操作简单,成本低;
[0028] 如图1所示,支架1上端设有多个挡板5,挡板5与支架1形成挡光腔体,摄像头2位于挡光腔体内。挡板5将外部的光线隔离,避免摄像头2受到外界光线干扰影响拍摄质量;
[0029] 通过移动装置3驱动摄像头,使摄像头2对PCB板进行拍摄,摄像头2在PCB板流经路线上进行横向、纵向运动,使流水线轨道工作时可以始终处于运行状态,避免停板导致元器
件偏移、掉落,而且缩小了摄像头2的视野,拍摄的图像更加清晰。
[0030] 以上述依据本实用新型的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项实用新型技术思想的范围内,进行多样的变更以及修改。本项实
用新型的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术
性范围。
声明:
“PCB板单相机光学检测机器人” 该技术专利(论文)所有权利归属于技术(论文)所有人。仅供学习研究,如用于商业用途,请联系该技术所有人。
我是此专利(论文)的发明人(作者)
 1089
编辑:管理员
来源:快克智能装备股份有限公司
1089
编辑:管理员
来源:快克智能装备股份有限公司



 咨询细节
咨询细节















































































 2026年08月06日 ~ 08日
2026年08月06日 ~ 08日 




















