1.本发明涉及一种针对大直径、深旋挖桩孔的垂直度高精度测量方法,属于测量技术领域。
背景技术:
2.随着我国交通与城市现代化建设的快速发展,高速铁路、高架桥和高层建筑的修建对桩基础承载能力的要求越来越高,桩孔深度与桩孔直径越来越大,对桩孔垂直度的要求也越来越高,桩孔孔斜过大导致穿孔、桩承载力下降而报废的问题时有发生。对大直径深灌注桩孔的垂直度进行高精度实时监测,对指导施工操作,保证大直径深孔灌注桩的整体质量具有重要意义。
3.常规的旋挖灌注桩成孔垂直度检测方法主要包括超声波法和接触式仪器组合法。超声波法要求被检测孔径(槽宽)应不小于0.5m,不大于5.0m,检测过程中探头升降速度不宜大于10m/min,而且需要在钻孔清孔完毕,孔中泥浆内气泡基本消散后才能进行检测,导致其时效性较差。接触式仪器组合法也需要在钻孔清孔完毕后进行测试,检测过程中探头升降速度不宜大于10m/min,同样存在时效性差的问题。考虑到泥浆静压与无线信号衰减的影响,常规随钻测斜技术无法直接应用于旋挖灌注桩孔的井斜检测。申请号为cn201110172906.8的中国专利公开了一种旋挖钻机的钻孔监测系统及其监测方法,其缺点是只能实现桩孔倾斜角度的测量,并不能监测桩孔偏斜距离与偏斜方向,因此不能很好地指导后续的修孔工作。
4.综上所述,目前还没有一种针对大直径深灌注桩孔垂直度的高精度实时监测方法,现有的检测方法难以实现桩孔垂直度的实时监测与质量控制,不能满足桩孔垂直度的监测需求。
技术实现要素:
5.本发明的目的在于针对现有技术之弊端,提供一种旋挖桩孔垂直度随钻测量方法,以实现对大直径深灌注桩孔垂直度的高精度实时监测,保证大直径深孔灌注桩的施工质量。
6.本发明所述问题是以下述技术方案解决的:
7.一种旋挖桩孔垂直度随钻测量方法,所述方法由设置在地面上的上位机和固定在旋挖钻头上的随钻测量装置构成测量系统,所述随钻测量装置设有随钻计算单元和与随钻计算单元连接的随钻存储单元、电子罗盘、陀螺仪和加速度计,在旋挖钻头由桩孔的孔口到孔底或孔底到孔口的移动过程中,随钻计算单元按照设定频率采集电子罗盘、陀螺仪和加速度计输出的信息并将信息存入随钻存储单元,然后把所有测点的信息上传给上位机,由上位机根据这些信息计算获取桩孔孔身三维轨迹,进而得到旋挖桩孔垂直度,实现对大直径深灌注桩孔垂直度的高精度实时监测。
8.上述旋挖桩孔垂直度随钻测量方法,所述方法包括以下步骤:
9.a.在旋挖钻头由桩孔的孔口到孔底或孔底到孔口的移动过程中,随钻计算单元按照设定的数据采集频率采集电子罗盘、陀螺仪和加速度计输出的数据并将数据存入随钻存储单元,采集的每组数据对应孔身轨迹上的一个测点,设测点c
i
的三维坐标为(x
i
,y
i
,z
i
),i=0,1,2
…
n,相邻两测点之间的连接线段为一个测段,用s
i
表示测点c
i
?1与测点c
i
之间的测段长度;测点c
i
处采集的数据包括由电子罗盘测获的陀螺仪y轴相对于磁北方向的偏角由加速度计测获的加速度a
i
以及由陀螺仪检测到的基于自身三轴坐标系的x轴自转动角度θ
1i
和y轴自转动角度θ
2i
;
10.b.计算测段长度:
11.测点c
i
?1与测点c
i
之间的测段长度为:
[0012][0013]
其中t为数据采集周期;
[0014]
c.计算测点c
i
处旋挖钻头的姿态角度:
[0015]
将z轴偏转后与竖直方向的夹角φ称为顶角,测点c
i
处的顶角φ
i
由下式计算:
[0016][0017]
将z轴偏转后的方向相对于磁北方向的角度称为方位角,测点c
i
处的方位角由下式计算:
[0018][0019]
d.获取桩孔孔身三维轨迹:
[0020]
计算测点c
i
(i=1,2
…
n)相对于前一测点在北方向上的坐标增量
△
n
i
、在东方向上的坐标增量
△
e
i
以及在垂直方向上的坐标增量
△
d
i
:
[0021][0022][0023][0024]
则测点c
i
的位置坐标(x
i
,y
i
,z
i
)为:
[0025][0026]
将各测点依次连接,得到桩孔孔身三维轨迹;
[0027]
e.计算旋挖桩孔垂直度
[0028]
计算测点c
i
相对于第一个测点c0的水平偏移量d
i
:
[0029]
[0030]
并找出测点水平偏移量最大值d
max
;
[0031]
计算桩孔垂向深度l:
[0032][0033]
则旋挖桩孔垂直度为:d
max
/l。
[0034]
上述旋挖桩孔垂直度随钻测量方法,所述随钻测量装置还包括与随钻计算单元相连接的随钻无线传输模块,电子罗盘、陀螺仪和加速度计采集的信息由随钻计算单元通过随钻无线传输模块和安装在随钻测量装置外壳上的天线以无线方式传输到上位机。
[0035]
上述旋挖桩孔垂直度随钻测量方法,为了直观观察桩孔水平偏斜距离与偏斜方向并判断旋挖桩孔垂直度是否合格,在上位机的显示屏上显示桩孔孔身三维轨迹及轨迹水平投影,同时在投影平面上显示以过第一个测点c0的竖直直线为中心轴,以预先设定的测点水平偏移量阀值d
lmt
为半径的圆,d
lmt
等于桩孔垂向深度l与设定的桩孔垂直度阀值的乘积,如果轨迹水平投影包含在该圆内则判断桩孔垂直度符合要求,否则判断桩孔垂直度不符合要求。
[0036]
上述旋挖桩孔垂直度随钻测量方法,所述上位机根据随钻存储单元存储的信息计算获取桩孔孔身三维轨迹的方法是:将这些信息传输到vps云端服务器,由vps云端服务器计算出桩孔孔身三维轨迹后将计算结果返回上位机(这样可降低对上位机的配置要求并便于后续结果分析的升级维护)。
[0037]
上述旋挖桩孔垂直度随钻测量方法,所述随钻无线传输模块为蓝牙模块。
[0038]
上述旋挖桩孔垂直度随钻测量方法,所述随钻测量装置和上位机均由电池供电,在随钻测量装置的外壳上设有航空插头和电源开关,随钻测量装置内部的供电电池通过航空插头与外部充电设备连接,所述电源开关串接在随钻测量装置的供电回路中。
[0039]
上述旋挖桩孔垂直度随钻测量方法,所述随钻测量装置贴靠在旋挖钻头上部的钻头方头的侧面上并通过捆绑机构固定,所述通过捆绑机构包括钢丝绳和花篮螺丝,所述钢丝绳穿过随钻测量装置外壳两侧的定位孔件并环绕钻头方头,钢丝绳的两端通过花篮螺丝连接,从而可通过调节花篮螺丝的长度将钢丝绳拉紧。
[0040]
上述旋挖桩孔垂直度随钻测量方法,所述随钻测量装置位于旋挖钻头侧壁上部的窗孔内并贴靠在旋挖钻头的顶板内侧,在随钻测量装置的下部设有与旋挖钻头固定连接的托架,在托架上设有顶紧螺栓,所述顶紧螺栓通过螺纹与托架配合并顶在随钻测量装置的下表面。
[0041]
本发明利用固定在旋挖钻头上的随钻测量装置采集和存储桩孔各测段姿态数据,并将存储的数据上传到上位机,由上位机根据桩孔各测段姿态数据计算出桩孔轨迹,进而得到桩孔垂直度,该方法既能给出桩孔各测段的倾斜角度,也能监测桩孔偏斜距离与偏斜方向,因此能够很好地指导后续的修孔工作,保证大直径深孔灌注桩的整体质量。
附图说明
[0042]
下面结合附图对本发明作进一步详述。
[0043]
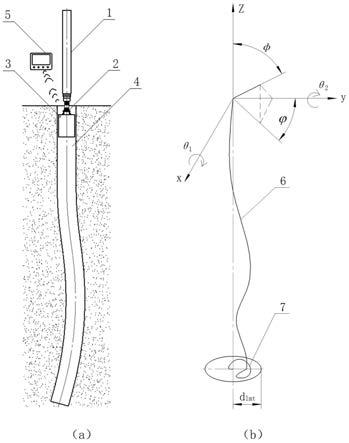
图1是本发明的旋挖桩孔垂直度随钻测量原理图,其中图1(a)是测量系统的安装示意图,图1(b)是旋挖桩孔垂直度计算原理图;
[0044]
图2是随钻测量装置的结构示意图,其中图2(a)是主视图,图2(b)是俯视图;
[0045]
图3是测量系统的电原理框图;
[0046]
图4是实际桩孔中钻头受井壁横向力示意图;
[0047]
图5(a)和图5(b)是随钻测量装置的两种固定位置示意图;
[0048]
图6(a)和图6(b)是随钻测量装置的两种固定方法示意图;
[0049]
图7(a)至图7(d)是根据校正平均角法计算得到的各测点三维坐标绘制的桩孔轨迹。
[0050]
图中各标号为:1、伸缩钻杆,2、旋挖钻头,2
?
1、钻头方头,2
?
2、旋挖钻头侧壁,3、随钻测量装置,4、桩孔,5、上位机,6、桩孔孔身三维轨迹,7、轨迹水平投影,8、航空插头,9、电源开关,10、天线,11、定位孔件,12、钢丝绳,13、卡头,14、花篮螺丝,15、窗孔,16、顶紧螺栓,17、托架。
具体实施方式
[0051]
针对现有技术中存在的问题,本发明提供了一种旋挖桩孔垂直度随钻测量方法,该方法通过随钻测量装置和上位机,实现每回次桩孔各测段姿态数据的测量及数据存储,随钻测量装置存储的数据通过蓝牙无线传输方式上传到上位机,并通过上位机内置算法实现桩孔姿态数据与孔斜、方位角的转化及桩孔轨迹的可视化输出,将桩孔孔身三维轨迹进行水平投影即可获得桩孔水平偏斜距离与偏斜方向,从而实现对大直径深灌注桩孔垂直度的高精度实时监测,进而通过指导施工操作,保证大直径深孔灌注桩的整体质量。此方法还可用于科学钻探、定向钻探及水平孔钻探中的井眼轨迹及相关关键参数的检测。
[0052]
参看图1至图7,本发明所采用的测量系统包括随钻测量装置3和上位机5,旋挖钻头2通过十字铰接于伸缩钻杆1下端,随钻测量装置3固定在旋挖钻头2上端内部或钻头方头2
?
1侧面上并与旋挖钻头2不发生相对运动,伸缩钻杆1伸长将旋挖钻头2带入桩孔4,且在桩孔4与旋挖钻头2之间有一定孔壁间隙。
[0053]
由于桩孔在成孔过程中存在孔径扩大率,因此实际桩孔为理论桩孔(竖直圆柱)的扩展,即在测量过程中,如果理论桩孔包含在实际桩孔内,则起下钻过程中,孔壁对旋挖钻头无横向力,最终测量得到的桩孔轨迹为一条竖直直线,满足垂直度要求;若由于地层或操作等因素影响而导致桩孔产生一定偏斜,则在起下钻过程中,旋挖钻头将贴在孔壁上且孔壁将对旋挖钻头产生横向力而使旋挖钻头一直保持与旋挖钻头所在孔段的轴向一致,从而实现旋挖钻头内随钻测量装置3对旋挖钻头所通过孔段的轴线姿态的数据收集,为桩孔实际孔身轨迹测量提供数据。通过gps授时,实现多
传感器的采集数据的时间轴同步,并通过姿态角与顶角、方位角转换计算,生成孔身轨迹;再将轨迹在水平面投影,得到最大水平偏移量,从而实现桩孔垂直度的检测。具体检测方法如下:
[0054]
随钻测量装置3主要由陀螺仪、加速度计、电子罗盘、随钻计算单元、随钻存储单元、随钻无线传输模块、随钻电池(图中未画出)、航空插头8、天线10、外壳、定位孔件11、电源开关9组成,各功能模块固定在外壳内部,随钻电池为各功能模块供电并通过航空插头8实现对自身的充电,陀螺仪实现随钻测量装置3基于三轴坐标系的各轴方向的转动量检测,加速度计实现装置自身加速度检测,电子罗盘标定陀螺仪y轴相对于磁北方向的偏斜角度,随钻计算单元实现对陀螺仪、加速度计、电子罗盘测获数据的整理(根据给定测量频率实现
一定时间间隔的数据的采集并形成各对应时间点的数据数组),随钻存储单元实现对各数据数组的存储记录,随钻计算单元通过随钻无线传输模块结合天线10将存储数据无线传输到上位机5,上位机5通过内置桩孔孔身三维轨迹算法程序计算出桩孔轨迹并在显示屏上显示输出,随钻测量装置3的外壳上设有用于装置内部供电的电源开关9,外壳采用合金材料制成并通过在壳体与盖板之间设置密封圈实现防水密封。根据施工要求在上位机5内设定符合要求的测点水平偏移量阀值d
lmt
(d
lmt
等于桩孔垂向深度l与设定的桩孔垂直度阀值的乘积),上位机接收到测量数据后,通过内置算法实现陀螺仪姿态数据与桩孔顶角、方位角的转换,并通过显示屏输出桩孔孔身三维轨迹6与轨迹水平投影7,并通过判断轨迹水平投影是否包含于以过孔口(第一个测点c0)的竖直直线为中心轴,以测点水平偏移量阀值d
lmt
为半径的圆内,指导下一回次是否修孔,从而实现每回次桩孔轨迹的实时监测,当桩孔水平偏移量超出阀值时给出提醒,指导操作人员及时进行垂直度修正作业。
[0055]
桩孔孔身三维轨迹算法:
[0056]
1.测段长度获取:将随钻测量装置3固定在旋挖钻头2上,保证随钻测量装置3与旋挖钻头的相对位置固定,随钻测量装置3将加速度计测获的加速度a对数据采集周期t(例如数据采集频率为100hz时对应的数据采集周期t=10ms)进行双重积分计算,得到测段长度s,具体计算过程如下:
[0057]
旋挖钻头2静置在孔口处时,随钻测量装置3的初始速度v0=0、时刻为t0,下一时刻t1=t0+t对应的速度为v1,以此类推,时刻t
i
=t0+t*i,i=0,1,
…
n对应的速度为测段长度s
i
为时刻t
i
?1到时刻t
i
所对应的时间段内随钻测量装置3的位移,
[0058]
2.姿态角度获取:姿态角度包括陀螺仪检测到的随钻测量装置3基于自身三轴坐标系的x、y轴自转动角度θ1和θ2,而z轴由于起下钻过程中伸缩钻杆不发生周向旋转而不旋转;当每一回次结束,旋挖钻头提到地表,通过蓝牙无线传输,将随钻测量装置采集的转动角度数据发送给上位机5;
[0059]
3.顶角、方位角计算:当x、y轴自转动一定角度θ1和θ2后,z轴产生一定的偏转,z轴偏转后的方向与竖直方向的夹角φ称为顶角,z轴偏转后的方向相对于磁北方向的角度称为方位角,θ1、θ2与φ、通过空间几何变换可建立等式关系,通过等式关系在上位机5内置角度转化程序,根据x、y轴转动角度θ1和θ2,结合电子罗盘标定的陀螺仪y轴相对于磁北方向的偏角即可计算出各个测点的φ与具体的计算公式如下:
[0060][0061]
根据上述计算方法,测点c
i
处的顶角φ
i
由下式计算:
[0062][0063]
测点c
i
处的方位角由下式计算:
[0064][0065]
4.根据测段长度、顶角与方位角数据,通过上位机内置校正平均角法程序实现孔身轨迹每个测点的位置坐标计算,并在上位机显示屏显示桩孔孔身三维轨迹6、轨迹水平投影7和桩孔垂直度,旋挖桩孔垂直度=d
max
/l(其中d
max
为测点水平偏移量最大值,l为桩孔垂向深度);具体的计算过程如下:
[0066]
先通过钻孔测段长度、顶角和方位角,计算出每个测点在北和东方向以及垂直方向上的坐标增量(
△
n
i
、
△
e
i
和
△
d
i
);然后进行数学累加,得到每个测点的坐标值;再将各测点连接成1条轨迹曲线,其中测点为根据仪器给定数据采集频率以一定时间间隔t(即数据采集周期)采集传感器数据的时刻所对应的仪器上相对固定一点的空间位置。设定从孔口到孔底各测点c
i
的三维坐标分别为c0(x0,y0,z0)、c1(x1,y1,z1)、
…
c
i
(x
i
,y
i
,z
i
)
…
c
n
(x
n
,y
n
,z
n
),相邻的两测点之间的连接线段为一个测段,则对应的c0与c1之间的直线距离为测段长度s1,c1与c2之间的直线距离为测段长度s2,c
i
?1与c
i
之间的直线距离为测段长度s
i
;各测段对应的
△
n
i
、
△
e
i
和
△
d
i
分别为:
[0067][0068][0069][0070]
根据计算各测点三维坐标并形成轨迹曲线。
[0071]
随钻测量装置固定方案1:通过在钻头方头2
?
1侧面设置捆绑机构实现随钻测量装置与旋挖钻头的固定,保证随钻测量装置与旋挖钻头的相对位置固定,从而实现检测旋挖钻头偏移姿态角度。捆绑机构包括钢丝绳12、卡头13、花篮螺丝14,将随钻测量装置端面贴在钻头方头2
?
1侧面上,钢丝绳12穿过定位孔件11的通孔,将随钻测量装置捆绑在钻头方头2
?
1上,钢丝绳12的两端分别穿过花篮螺丝14两端的圆孔并翻折180
°
后用卡头13卡紧,最后通过调节花篮螺丝14轴向长度将钢丝绳拉紧,将随钻测量装置捆绑在钻头方头2
?
1上,实现随钻测量装置3的固定,其中花篮螺丝14也可以替换为棘轮收紧器等具有拉紧作用的装置。
[0072]
随钻测量装置固定方案2:在旋挖钻头侧壁2
?
2上部位置加工窗孔15,并在窗孔15内部焊接固定托架17,随钻测量装置3放置在托架17上,并通过托架17底部的顶紧螺栓16将随钻测量装置顶紧在旋挖钻头的顶板内侧,保证随钻测量装置与旋挖钻头的相对位置固定,从而实现检测旋挖钻头偏移姿态角度。
[0073]
实施例:将随钻测量装置3通过固定方案1或固定方案2与旋挖钻头固定,随着伸缩钻杆下到某桩孔底部并上提到地表,采集相关信息如表1所示,其中a为测量时序号,记录各存储数据所对应的测量时刻;b~d为加速度计测获各轴向加速度值,e~g为陀螺仪测获各轴转动角速度,h~j为陀螺仪各轴绕自身转动角度,k为随钻测量装置显示电量,l为计算单
元内置电子罗盘测得的陀螺仪y轴与地磁北极方向角度。,通过上位机计算出测段长度s、顶角φ与方位角数据,根据s_sum=s1+s2+
…
+sn,可计算出第n个测段对应的孔深s_sum,各测段对应的孔深s_sum、顶角φ与方位角数据如表2所示。根据上述数据,采用校正平均角法计算得到各测点三维坐标并绘制桩孔轨迹及计算相关轨迹参数如图7所示。
[0074]
表1采集原始信息
[0075][0076][0077]
表2上位机解算得到数据
[0078][0079][0080]
本发明充分考虑并利用旋挖灌注桩孔每回次提钻取心的施工特点,采用孔内测井数据采集、存储,地表回传,实现回次监测的“随钻测斜”方案,具有更高的经济性与可行性。考虑灌注桩孔对垂直度监测精度的高要求,采用桩孔孔身三维轨迹水平投影法标定桩孔垂直度阀值的方案,相对于直接测量孔斜的方案,可以实现桩孔垂直度的每回次监测和桩孔偏斜方位的计算,同时对井斜、方位角测量的传感器精度要求更低,降低了测量成本,提高了最终测量精度。技术特征:
1.一种旋挖桩孔垂直度随钻测量方法,其特征是,所述方法由设置在地面上的上位机(5)和固定在旋挖钻头(2)上的随钻测量装置(3)构成测量系统,所述随钻测量装置(3)设有随钻计算单元和与随钻计算单元连接的随钻存储单元、陀螺仪、电子罗盘和加速度计,在旋挖钻头(2)由桩孔的孔口到孔底或孔底到孔口的移动过程中,随钻计算单元按照设定频率采集电子罗盘、陀螺仪和加速度计输出的信息并将信息存入随钻存储单元,然后把所有测点的信息上传给上位机(5),由上位机(5)根据这些信息计算获取桩孔孔身三维轨迹,进而得到旋挖桩孔垂直度,实现对大直径深灌注桩孔垂直度的高精度实时监测。2.根据权利要求1所述的一种旋挖桩孔垂直度随钻测量方法,其特征是,所述方法包括以下步骤:a.在旋挖钻头(2)由桩孔的孔口到孔底或孔底到孔口的移动过程中,随钻计算单元按照设定的数据采集频率采集电子罗盘、陀螺仪和加速度计输出的数据并将数据存入随钻存储单元,采集的每组数据对应孔身轨迹上的一个测点,设测点c
i
的三维坐标为(x
i
,y
i
,z
i
),i=0,1,2
…
n,相邻两测点之间的连接线段为一个测段,用s
i
表示测点c
i
?1与测点c
i
之间的测段长度;测点c
i
处采集的数据包括由电子罗盘测获的陀螺仪y轴相对于磁北方向的偏角由加速度计测获的加速度a
i
以及由陀螺仪检测到的基于自身三轴坐标系的x轴自转动角度θ
1i
和y轴自转动角度θ
2i
;b.计算测段长度:测点c
i
?1与测点c
i
之间的测段长度为:其中t为数据采集周期;c.计算测点c
i
处旋挖钻头的姿态角度:将z轴偏转后与竖直方向的夹角φ称为顶角,测点c
i
处的顶角φ
i
由下式计算:将z轴偏转后的方向相对于磁北方向的角度称为方位角,测点c
i
处的方位角由下式计算:d.获取桩孔孔身三维轨迹:计算测点c
i
(i=1,2
…
n)相对于前一测点在北方向上的坐标增量
△
n
i
、在东方向上的坐标增量
△
e
i
以及在垂直方向上的坐标增量
△
d
i
::
则测点c
i
的位置坐标(x
i
,y
i
,z
i
)为:将各测点依次连接,得到桩孔孔身三维轨迹;e.计算旋挖桩孔垂直度计算测点c
i
相对于第一个测点c0的水平偏移量d
i
:并找出测点水平偏移量最大值d
max
;计算桩孔垂向深度l:则旋挖桩孔垂直度为:d
max
/l。3.根据权利要求1或2所述的一种旋挖桩孔垂直度随钻测量方法,其特征是,所述随钻测量装置还包括与随钻计算单元相连接的随钻无线传输模块,电子罗盘、陀螺仪和加速度计采集的信息由随钻计算单元通过随钻无线传输模块和安装在随钻测量装置(3)外壳上的天线(10)以无线方式传输到上位机(5)。4.根据权利要求3所述的一种旋挖桩孔垂直度随钻测量方法,其特征是,为了直观观察桩孔水平偏斜距离与偏斜方向并判断旋挖桩孔垂直度是否合格,在上位机(5)的显示屏上显示桩孔孔身三维轨迹(6)及轨迹水平投影(7),同时在投影平面上显示以过第一个测点c0的竖直直线为中心轴,以预先设定的测点水平偏移量阀值d
lmt
为半径的圆,d
lmt
等于桩孔垂向深度l与设定的桩孔垂直度阀值的乘积,如果轨迹水平投影(7)包含在该圆内则判断桩孔垂直度符合要求,否则判断桩孔垂直度不符合要求。5.根据权利要求4所述的一种旋挖桩孔垂直度随钻测量方法,其特征是,所述上位机(5)根据随钻存储单元存储的信息计算获取桩孔孔身三维轨迹的方法是:将这些信息传输到vps云端服务器,由vps云端服务器计算出桩孔孔身三维轨迹后将计算结果返回上位机。6.根据权利要求5所述的一种旋挖桩孔垂直度随钻测量方法,其特征是,所述随钻无线传输模块为蓝牙模块。7.根据权利要求6所述的一种旋挖桩孔垂直度随钻测量方法,其特征是,所述随钻测量装置(3)和上位机均由电池供电,在随钻测量装置(3)的外壳上设有航空插头(8)和电源开关(9),随钻测量装置内部的供电电池通过航空插头(8)与外部充电设备连接,所述电源开关(9)串接在随钻测量装置(3)的供电回路中。8.根据权利要求7所述的一种旋挖桩孔垂直度随钻测量方法,其特征是,所述随钻测量装置(3)贴靠在旋挖钻头(2)上部的钻头方头(2
?
1)的侧面上并通过捆绑机构固定,所述通过捆绑机构包括钢丝绳(12)和花篮螺丝(14),所述钢丝绳(12)穿过随钻测量装置(3)外壳两侧的定位孔件(11)并环绕钻头方头(2
?
1),钢丝绳(12)的两端通过花篮螺丝(14)连接,从而可通过调节花篮螺丝(14)的长度将钢丝绳(12)拉紧。
9.根据权利要求7所述的一种旋挖桩孔垂直度随钻测量方法,其特征是,所述随钻测量装置(3)位于旋挖钻头侧壁(2
?
2)上部的窗孔(15)内并贴靠在旋挖钻头(2)的顶板内侧,在随钻测量装置(3)的下部设有与旋挖钻头(2)固定连接的托架(17),在托架(17)上设有顶紧螺栓(16),所述顶紧螺栓(16)通过螺纹与托架(17)配合并顶在随钻测量装置(3)的下表面。
技术总结
一种旋挖桩孔垂直度随钻测量方法,所述方法由上位机和随钻测量装置构成测量系统,所述随钻测量装置设有随钻计算单元和与随钻计算单元连接的随钻存储单元、电子罗盘、陀螺仪和加速度计,在旋挖钻头由桩孔的孔口到孔底的移动过程中,随钻计算单元按照设定频率采集电子罗盘、陀螺仪和加速度计输出的信息并将信息存入随钻存储单元,然后把所有测点的信息上传给上位机,由上位机根据这些信息获取桩孔孔身三维轨迹。本发明利用随钻测量装置采集和存储桩孔各测段姿态数据,由上位机计算出桩孔轨迹,进而得到桩孔垂直度,既能给出桩孔各测段的倾斜角度,也能监测偏斜距离与偏斜方向,因此能够很好地指导后续的修孔工作,保证大直径深孔灌注桩的整体质量。灌注桩的整体质量。灌注桩的整体质量。
技术研发人员:尹浩 梁健 李鑫淼 李宽 贾炜 王志刚 施山山
受保护的技术使用者:中国地质科学院勘探技术研究所
技术研发日:2021.07.28
技术公布日:2021/11/16
声明:
“旋挖桩孔垂直度随钻测量方法” 该技术专利(论文)所有权利归属于技术(论文)所有人。仅供学习研究,如用于商业用途,请联系该技术所有人。
我是此专利(论文)的发明人(作者)
 1384
编辑:北方有色网
来源:中国地质科学院勘探技术研究所
1384
编辑:北方有色网
来源:中国地质科学院勘探技术研究所



 咨询细节
咨询细节















































































 2026年08月06日 ~ 08日
2026年08月06日 ~ 08日 




















