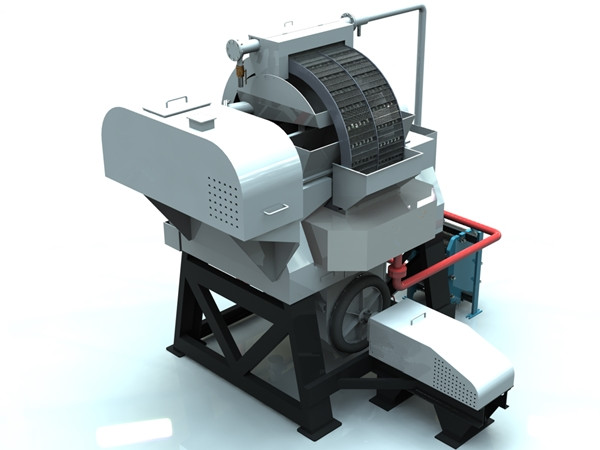
权利要求书: 1.单质体四机倍频自同步驱动振动机,其特征在于,该振动机的动力学模型包括:四个激振器、一个质体、弹簧A与弹簧B;其中质体通过弹簧A与弹簧B与地基相连,弹簧对称分布于质体上;四个激振器两两分别安装在质体的上侧和下侧,每个激振器中各有一偏心转子,偏心转子由各自的感应电动机驱动,分别绕着旋转轴线中心旋转,同侧的两个频率相同的激振器关于y轴对称分布,但旋转方向相反,倍频自同步驱动,实现设备双频双直线轨迹运动功能。
2.权利要求1所述的单质体四机倍频自同步驱动振动机的参数确定方法,其特征在于,所述的四个激振器的参数确定方法,包括如下步骤:步骤1,建立动力学模型和系统运动微分方程;
建立坐标系:四个激振器分别绕着旋转中心轴o1,o2,o3和o4旋转; 分别是四个转子的旋转角;四个激振器与x轴的夹角分别用β1,β2,β3和β4表示;整个系统展现出三个自由度:直线运动x,y和摆动角ψ;
根据Lagrange方程,得系统的运动微分方程如下:其中
步骤2,四激振器倍频同步理论分析四个激振器实现同步运转,激振器1和2的转速相同,激振器3和4的转速是激振器1和2转速的整数倍,分别用n3、n4表示,以顺时针旋转方向为正方向,有:将式(1)等号左边的第二项和第三项省略掉;得到 的近似表达式为:其中
σ1=σ3=?1,σ2=σ4=1式中,小参数ε是激振器偏心块质量与系统总质量的比值;σi(i=1,2,3,4)值的正负表示偏心块的旋转方向,正值代表顺时针方向旋转,负值代表逆时针方向旋转;
把旋转相位角作如下表示:
其中
τ=ωt,n1=n2=1
式中,Δi是由于系统的运动而随着激振器偏心转子的产生阶段而缓慢变化的函数;
将式(4)代入式(3)中得:其中,
+ ?
ψij=(σini+σjnj)τ+σiΔi+σjΔj+βi+βj,ψij=(σini?σjnj)τ+σiΔi?σjΔj+βi?βj式(5)为激振器实现同步的基本表达式;
把式(5)写成标准形式:
式(5)和(6)关于未知参数Δi和νi建立的一阶微分方程表达式如下:在式(7)第二个等式中,因为 与小参数 成比例,νi是缓慢变化的函数;将νi的缓慢变化项Ωi与小振动项叠加,改进第一近似解:其中
σini+σjnj≠0时pij=1/(σini+σj
声明:
“单质体四机倍频自同步驱动振动机及其参数确定方法” 该技术专利(论文)所有权利归属于技术(论文)所有人。仅供学习研究,如用于商业用途,请联系该技术所有人。
我是此专利(论文)的发明人(作者)
 361
编辑:北方有色网
来源:东北大学
361
编辑:北方有色网
来源:东北大学



 咨询细节
咨询细节






































































 2026年03月20日 ~ 22日
2026年03月20日 ~ 22日 





