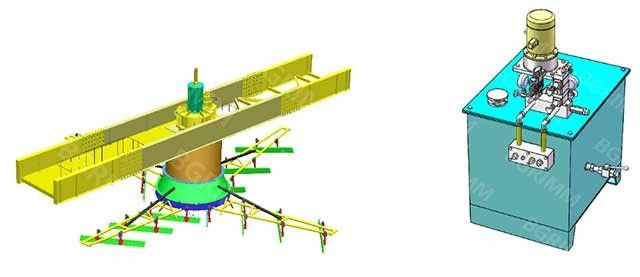
权利要求书: 1.一种同步重力驱动式全断面断带抓捕器,其特征在于,包括:基座(1);上抓捕梁(2),其设置于所述基座(1)的顶部;上抓捕臂(3),其可转动的设置于所述基座(1)的中部,且所述上抓捕臂(3)设有用于支撑输送带(7)的托带辊(31),所述上抓捕臂(3)转动至第一工作位置时,所述输送带(7)贴合于所述托带辊(31)的周面,所述上抓捕臂(3)转动至第二工作位置的过程中,所述上抓捕臂(3)推动所述输送带(7)的承载段(7-1)移动至所述上抓捕臂(3)与所述上抓捕梁(2)之间的间隙,所述上抓捕臂(3)转动至第二工作位置时,所述承载段(7-1)卡接于所述间隙中;下抓捕梁(4),其设置于所述基座(1)的底部;下抓捕臂(5),其可转动的设置于所述基座(1)的中部,且所述下抓捕臂(5)与所述上抓捕臂(3)同步的反向转动,所述上抓捕臂(3)转动至第二工作位置时,所述输送带(7)的回空段(7-2)卡接于所述下抓捕臂(5)与所述下抓捕梁(4);动力组件(6),其设置于所述上抓捕臂(3)或所述下抓捕臂(5),用于在所述输送带(7)断带时驱动所述上抓捕臂(3)和所述下抓捕臂(5)转动。2.根据权利要求1所述的同步重力驱动式全断面断带抓捕器,其特征在于,所述动力组件(6)为重力锤(6-1)和转动臂(6-2),所述转动臂(6-2)的一端设置于所述上抓捕臂(3)的端部,所述重力锤(6-1)固定于所述转动臂(6-2)的另一端。3.根据权利要求2所述的同步重力驱动式全断面断带抓捕器,其特征在于,所述基座(1)设有第一定位销(8),所述第一定位销(8)可插入或拔出所述基座(1);所述第一定位销(8)插入所述基座(1)时,所述第一定位销(8)阻挡所述转动臂(6-2)时,用于限制所述转动臂(6-2)的转动;所述第一定位销(8)拔出所述基座(1)时,所述第一定位销(8)让位所述转动臂(6-2)时,用于保证所述输送带(7)断带时所述转动臂(6-2)可转动。4.根据权利要求2所述的同步重力驱动式全断面断带抓捕器,其特征在于,所述基座(1)还设有第二定位销(9),所述第二定位销(9)用于阻挡所述转动臂(6-2),以保证断带发生后所述上抓捕臂(3)保持在第二工作位置。5.根据权利要求2所述的同步重力驱动式全断面断带抓捕器,其特征在于,还包括防护罩(10),所述防护罩(10)设置于所述重力锤(6-1)
声明:
“同步重力驱动式全断面断带抓捕器及带式输送机” 该技术专利(论文)所有权利归属于技术(论文)所有人。仅供学习研究,如用于商业用途,请联系该技术所有人。
我是此专利(论文)的发明人(作者)
 427
编辑:北方有色网
来源:兖矿东华重工有限公司
427
编辑:北方有色网
来源:兖矿东华重工有限公司



 咨询细节
咨询细节






































































 2026年03月20日 ~ 22日
2026年03月20日 ~ 22日 





