全部
▼
热搜:
 859
859
 0
0
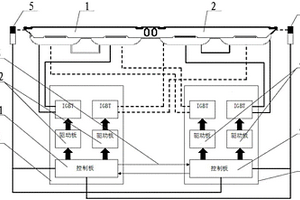
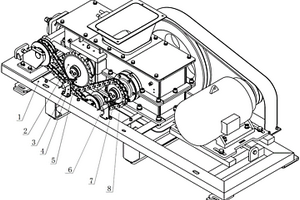
本发明公开了一种悬浮控制系统,包括用于控制第一电磁铁的第一控制器和用于控制第二电磁铁的第二控制器,第一控制器的第一控制板与第二电磁铁建立控制连接,并在判定第二控制器失去控制能力时,第一控制板能够根据第二电磁铁的监测传感器的监测信号对第二电磁铁进行控制。在该悬浮控制系统中,将其它电磁铁的控制器与该电磁铁进行控制连接,以当该电磁铁的控制器失去控制能力时,促使其它电磁铁的控制器同时对该电磁铁的控制器进行控制,以有效地保证磁浮列车的正常运行。综上,该悬浮控制系统能够有效地解决当磁浮列车发生单点故障时可能导致控制失效和掉点问题。本发明还公开了一种包括上述悬浮控制系统的磁浮列车。
 1441
0
1441
0
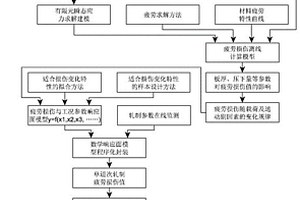
本发明涉及一种轧机联轴器疲劳寿命的在线计算方法,属于冶金装备智能维护领域。轧机联轴器疲劳失效频繁发生对钢铁生产造成巨大的危害,而现有的评估方法无法实现在线参数与复杂模型的实时共融评估。因此,本发明提出该解决方法:建立轧制过程瞬态动力学模型并进行仿真,再建立疲劳损伤离线计算模型,得到轧制参数对疲劳损伤值的影响,再建立疲劳损伤与工况参数快速求解数值响应面模型并进行程序化封装,再将在线监测的轧制参数输入,得到疲劳损伤值和实时剩余寿命,并进行对比验证和精度评估。本发明可实现了轧机联轴器疲劳损伤在线准确评估和监测。
 1401
0
1401
0
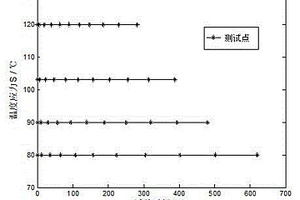
本发明公开了一种基于加速因子的运动控制器加速退化试验方法,包括以下步骤:步骤1、设计运动控制器加速退化试验方案;步骤2、将所述样品放入温度试验箱内进行试验;等。本发明方法的特点是将输出信号脉宽差作为运动控制器性能退化的测试指标,以温度作为加速应力,利用在短时加速试验中获得的性能数据对运动控制器性能退化过程进行建模,从而预测运动控制器在正常条件下的可靠度和工作寿命。该方法能够反映运动控制器在正常条件下的失效进程,以较大的加速系数进行加速试验,缩短了试验时间,为运动控制器退化寿命研究提供了一种可行的技术方法。
 1639
0
1639
0
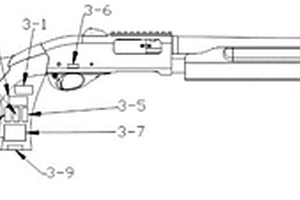
本发明公开了一种防暴枪支安全控制系统及其工作方法,包括后台服务器、遥控器和安装在枪支上的控制机构;后台服务器用于实时显示枪支信息并且用于远程控制枪支解锁及锁定;遥控器由非持枪人员掌控,用于在紧急状况下控制枪支解锁及锁定;控制机构安装在枪支内部,用于接收信号控制枪支解锁及锁定,其包括通信模块、监测模块、定位模块、数据处理模块、信息储存模块、控制电机、电池、电量统计与显示装置及充电与数据接口。本发明能够实时记录枪支位置、电量、射击等信息,在非紧急状况下,通过控制电机将枪支发射机锁定,在遭遇突发状况时,由非持枪人员通过遥控器,解锁发射机,当遥控器失效或遭遇盗抢时,后台服务器可远程控制枪支解锁与锁定。
 1138
0
1138
0
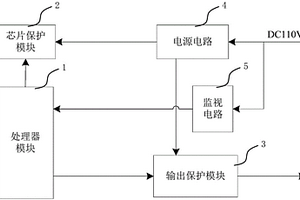
本发明公开了一种变流器控制单元保护装置及方法,电源电路将外部输入电源转换为DCU内部所需要的电压,监视电路监视外部输入电源的掉电状态,并将掉电状态反馈至处理器模块。芯片保护模块和输出保护模块监视电源电路上电和掉电状态,根据该状态执行对应的保护动作。当处理器模块监测到外部输入电源掉电后,将保护逻辑发送至芯片保护模块和输出保护模块,芯片保护模块和输出保护模块执行相应的保护动作。处理器模块同时监测自身程序的加载状态,并将该加载状态传送至输出保护模块,由输出保护模块执行对应的保护动作。本发明能够解决DCU在上电、掉电过程缺乏有效保护,产品自带存储装置易被误操作,从而导致外部变流模块损坏失效的技术问题。
 1037
0
1037
0
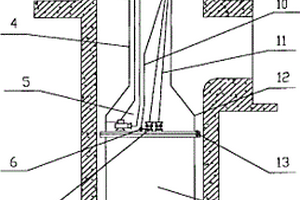
本发明涉及一种能排除泄漏液体的防抬机,其在防抬机内安装泄漏传感器来监测泄漏液体,并安装电泵来排除泄漏液体。电泵通过其动力电缆和出液管与外界相连,可解决防抬机内由于密封失效而导致泄漏液体滞留的问题,实现有效的监测泄漏液体并将其排出至预期处。
 1113
0
1113
0
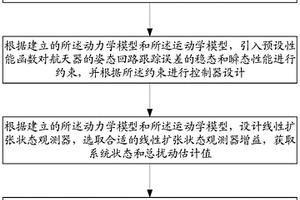
本发明提供了一种考虑任务时间约束的航天器姿态控制方法,包括:根据航天器模型中的参数不确定性、未建模动态和外部扰动,建立航天器姿态误差的动力学模型和运动学模型,根据建立的所述动力学模型和所述运动学模型,引入预设性能函数对航天器的姿态回路跟踪误差的稳态和瞬态性能进行约束,并根据所述约束进行控制器设计;设计线性扩张状态观测器,选取合适的线性扩张状态观测器增益,获取系统状态和总扰动估计值;使面临执行器饱和及部分失效的情况下,系统的跟踪误差可以收敛至预先设定的区域内。本发明实现了对考虑任务时间约束的航天器姿态的跟踪控制,满足了姿态跟踪的稳定性和精度要求,具有良好的鲁棒性。
 963
0
963
0
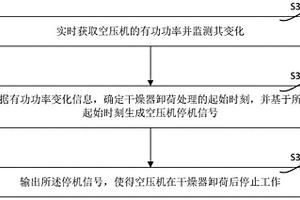
本发明公开了一种用于新能源客车空压机的卸荷控制方法,包括:实时获取空压机的有功功率并监测其变化;根据有功功率变化信息,确定干燥器卸荷处理的起始时刻,并基于起始时刻生成空压机停机信号;输出停机信号,使得空压机在干燥器卸荷后停止工作。本发明准确判断干燥器实际已经卸荷的时机,降低成本,减少硬件或信号电路传输等失效点,保证可靠性。
 995
0
995
0
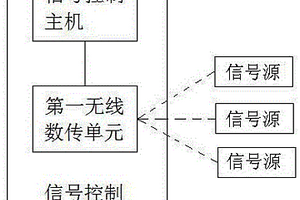
本发明涉及一种同步角度闪烁的导航干扰信号发射方法与系统,属于卫星信号源控制技术领域,包括信号控制分系统和分布在N个位置的N台信号源,N≥3;信号参数和时间同步指令按照空中接口协议组帧后通过第一无线数传模块的无线链路发送给N台信号源;N台信号源从各个角度周期性地对目标发送非相干信号,形成角度闪烁信号发射;有益效果在于多台信号源的精确时间同步和实施角度闪烁干扰,既造成抗干扰接收机的抗干扰算法失效,接收机无法正常定位,也造成接收端信号测向定位系统无法测定信号源位置坐标。
 1026
0
1026
0
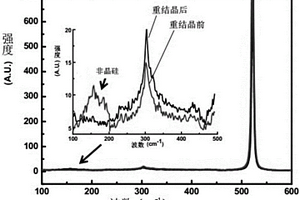
一种金刚线硅片重结晶湿法制绒的方法,包括以下步骤:(1)将金刚线硅片传送至设备的高温区;(2)所述硅片在该高温区停留若干时间,硅片表面受热,非晶硅发生熔化,而硅片的主体不熔化;(3)所述硅片表面的非晶硅层完成熔化或者稍微过熔后,将所述硅片传送出该高温区,所述硅片表面冷却重结晶,形成多晶结构;(4)将所述硅片进行湿法酸制绒。对所述硅片表面绒面进行全系太阳光谱的反射率测量,所述硅片绒面反射率低于现有普通多晶硅片酸制绒面的反射率。本发明通过非晶硅重结晶,解决了金刚线硅片直接用湿法酸制绒失效的问题,制得了太阳光反射率低的理想绒面,提高光伏电池的转换效率的同时,也降低了整个光伏发电的成本。
 1043
0
1043
0
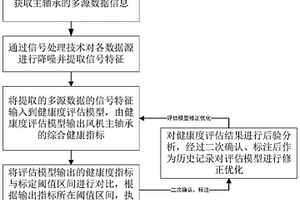
本发明公开了一种基于多源数据的风机轴承运行健康度评估方法及系统,属于轴承运行状况评估技术领域。首先采集风机主轴承的多个监测数据源的信息,然后对采集的各数据源的信号进行降噪和特征提取,再将经处理的信号特征输入风机主轴承健康度评估模型,输出风机主轴承综合健康指标最后将得到的风机主轴承综合健康指标与标定阈值区间进行对比,确定风机主轴承综合健康指标所在阈值区间,完成健康度评估,并根据健康度评估结果匹配不同程度的运维策略。本发明能够综合、全面地对风机主轴承运行健康状态进行评估,并进行预防性监测,减少失效所造成的停机维修成本及发电量损失。
 1226
0
1226
0
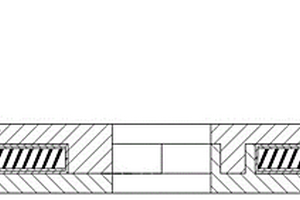
本发明公开了一种内嵌倾斜纤维的压电智能垫片制作及应用方法,所述压电智能垫片包括壳体和内嵌倾斜纤维压电传感器,所述壳体由“阳形”垫片和“阴形”垫片同心配合形成周向环形槽组成,所述内嵌倾斜纤维压电传感器,由压电纤维复合材料、电极层、绝缘屏蔽层组成;所述压电纤维复合材料包括倾斜压电纤维、环氧树脂基体;该压电智能垫片利用将内嵌倾斜纤维压电传感器与螺栓的垫片结构进行集成,通过传感器感知联接工件结构的应力应变变化等信息,实现结构损伤实时监测,同时可以监测螺栓预紧力的变化,节省了传感器的布置空间,易于传感器更换,该内嵌倾斜纤维压电传感器较于一般压电元件,具有柔韧性,能够承载一定冲击,减少失效率。
 1328
0
1328
0
一种惯性卫星序贯紧组合李群滤波方法,捷联惯导系统正常接收数据信息;卫星导航接收机根据外界环境电磁干扰强度,实时调整卫星导航数据接收的序贯方案;根据卫星导航接收机和捷联惯导系统接收的数据信息,建立基于李群卡尔曼滤波的惯性/卫星紧组合导航模型,完成基于李群卡尔曼滤波的惯性/卫星紧组合导航,在每次李群卡尔曼滤波结束后对惯性/卫星紧组合导航系统的非线性误差状态进行校正,输出校正后的组合导航的姿态、速度、位置信息。本发明引入序贯滤波,减少卫星观测数量的方式,改善强电磁环境下惯性/卫星组合导航系统易受干扰而失效的问题,达到无人载体在强电磁干扰下导航定位精度与任务可靠性的目的。
 1428
0
1428
0
本发明公开了一种桩间土钢构造柱控滑移面施工方法及结构。在土层软硬交界面位置设置1m的实桩可起到支座作用,冠梁则作为另一端支座,注浆完成后立即安放钢筋骨架,从而实现桩间土稳固效果,从而以桩间土钢构造柱“稳固”的方式切断土拱空间滑移面,限制土拱失效和分担土拱荷载,提高基坑开挖工程质量与安全。同时在支护桩冠梁部位加强监测,保障安全,本发明能广泛应用地下空间开发基坑施工。
 1523
0
1523
0
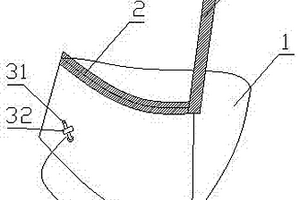
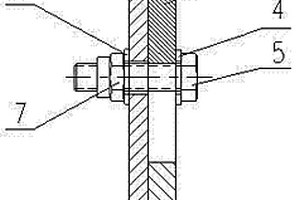
本发明公开一种壁挂炉安装固定结构,其特征在于,包括安装固定支架和膨胀螺栓,所述安装固定支架固定在承载体上,在所述安装固定支架上设有挂钩和膨胀螺栓孔,所述膨胀螺栓穿过所述膨胀螺栓孔与所述承载体固定,所述壁挂炉通过与所述挂钩和所述膨胀螺栓配合的挂板安装到所述安装固定支架上。实际安装时,先将安装固定支架固定到墙体或其他承载体上,再直接挂壁挂炉,由于安装固定支架自带膨胀螺栓孔,无需反复用量具测定定位,安装方便、快捷、可靠。同时,由于悬挂受力主要为膨胀螺栓,当膨胀螺栓松动,受力失效时,安装固定支架通过挂钩继续支撑壁挂炉,安全性好。本发明还提供一种安装固定支架。
 1128
0
1128
0
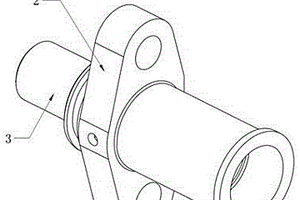
本实用新型提供一种模块化的霍尔速度传感器。所述模块化的霍尔速度传感器包括包括安装法兰、设于所述安装法兰内的霍尔式测速模块;所述霍尔式测速模块包括管壳,以及设于所述管壳的内部、沿其轴向依次设置的绝缘垫片、霍尔芯片、磁极片、永磁体、电路板,所述电路板的两面均覆盖有一层弹性硅胶,所述管壳内剩余的空间填充有环氧树脂。本实用新型提供的所述模块化的霍尔速度传感器解决了现有技术的霍尔式的速度传感器存在的通用性差、信号输出异常、电路失效的技术问题。
988
0
本发明公开了一种悬浮控制系统,包括用于控制第一电磁铁的第一控制器和用于控制第二电磁铁的第二控制器,第一控制器的第一控制板与第二电磁铁建立控制连接,并在判定第二控制器失去控制能力时,第一控制板能够根据第二电磁铁的监测传感器的监测信号对第二电磁铁进行控制。在该悬浮控制系统中,将其它电磁铁的控制器与该电磁铁进行控制连接,以当该电磁铁的控制器失去控制能力时,促使其它电磁铁的控制器同时对该电磁铁的控制器进行控制,以有效地保证磁浮列车的正常运行。综上,该悬浮控制系统能够有效地解决当磁浮列车发生单点故障时可能导致控制失效和掉点问题。本发明还公开了一种包括上述悬浮控制系统的磁浮列车。
1338
0
本发明涉及一种轧机联轴器疲劳寿命的在线计算方法,属于冶金装备智能维护领域。轧机联轴器疲劳失效频繁发生对钢铁生产造成巨大的危害,而现有的评估方法无法实现在线参数与复杂模型的实时共融评估。因此,本发明提出该解决方法:建立轧制过程瞬态动力学模型并进行仿真,再建立疲劳损伤离线计算模型,得到轧制参数对疲劳损伤值的影响,再建立疲劳损伤与工况参数快速求解数值响应面模型并进行程序化封装,再将在线监测的轧制参数输入,得到疲劳损伤值和实时剩余寿命,并进行对比验证和精度评估。本发明可实现了轧机联轴器疲劳损伤在线准确评估和监测。
1292
0
本发明公开了一种基于加速因子的运动控制器加速退化试验方法,包括以下步骤:步骤1、设计运动控制器加速退化试验方案;步骤2、将所述样品放入温度试验箱内进行试验;等。本发明方法的特点是将输出信号脉宽差作为运动控制器性能退化的测试指标,以温度作为加速应力,利用在短时加速试验中获得的性能数据对运动控制器性能退化过程进行建模,从而预测运动控制器在正常条件下的可靠度和工作寿命。该方法能够反映运动控制器在正常条件下的失效进程,以较大的加速系数进行加速试验,缩短了试验时间,为运动控制器退化寿命研究提供了一种可行的技术方法。
962
0
本发明公开了一种变流器控制单元保护装置及方法,电源电路将外部输入电源转换为DCU内部所需要的电压,监视电路监视外部输入电源的掉电状态,并将掉电状态反馈至处理器模块。芯片保护模块和输出保护模块监视电源电路上电和掉电状态,根据该状态执行对应的保护动作。当处理器模块监测到外部输入电源掉电后,将保护逻辑发送至芯片保护模块和输出保护模块,芯片保护模块和输出保护模块执行相应的保护动作。处理器模块同时监测自身程序的加载状态,并将该加载状态传送至输出保护模块,由输出保护模块执行对应的保护动作。本发明能够解决DCU在上电、掉电过程缺乏有效保护,产品自带存储装置易被误操作,从而导致外部变流模块损坏失效的技术问题。
1254
0
本发明涉及一种能排除泄漏液体的防抬机,其在防抬机内安装泄漏传感器来监测泄漏液体,并安装电泵来排除泄漏液体。电泵通过其动力电缆和出液管与外界相连,可解决防抬机内由于密封失效而导致泄漏液体滞留的问题,实现有效的监测泄漏液体并将其排出至预期处。
1189
0
本发明提供了一种考虑任务时间约束的航天器姿态控制方法,包括:根据航天器模型中的参数不确定性、未建模动态和外部扰动,建立航天器姿态误差的动力学模型和运动学模型,根据建立的所述动力学模型和所述运动学模型,引入预设性能函数对航天器的姿态回路跟踪误差的稳态和瞬态性能进行约束,并根据所述约束进行控制器设计;设计线性扩张状态观测器,选取合适的线性扩张状态观测器增益,获取系统状态和总扰动估计值;使面临执行器饱和及部分失效的情况下,系统的跟踪误差可以收敛至预先设定的区域内。本发明实现了对考虑任务时间约束的航天器姿态的跟踪控制,满足了姿态跟踪的稳定性和精度要求,具有良好的鲁棒性。
1112
0
本发明涉及一种同步角度闪烁的导航干扰信号发射方法与系统,属于卫星信号源控制技术领域,包括信号控制分系统和分布在N个位置的N台信号源,N≥3;信号参数和时间同步指令按照空中接口协议组帧后通过第一无线数传模块的无线链路发送给N台信号源;N台信号源从各个角度周期性地对目标发送非相干信号,形成角度闪烁信号发射;有益效果在于多台信号源的精确时间同步和实施角度闪烁干扰,既造成抗干扰接收机的抗干扰算法失效,接收机无法正常定位,也造成接收端信号测向定位系统无法测定信号源位置坐标。
1505
0
本发明公开了一种基于多源数据的风机轴承运行健康度评估方法及系统,属于轴承运行状况评估技术领域。首先采集风机主轴承的多个监测数据源的信息,然后对采集的各数据源的信号进行降噪和特征提取,再将经处理的信号特征输入风机主轴承健康度评估模型,输出风机主轴承综合健康指标最后将得到的风机主轴承综合健康指标与标定阈值区间进行对比,确定风机主轴承综合健康指标所在阈值区间,完成健康度评估,并根据健康度评估结果匹配不同程度的运维策略。本发明能够综合、全面地对风机主轴承运行健康状态进行评估,并进行预防性监测,减少失效所造成的停机维修成本及发电量损失。
1306
0
本发明公开了一种内嵌倾斜纤维的压电智能垫片制作及应用方法,所述压电智能垫片包括壳体和内嵌倾斜纤维压电传感器,所述壳体由“阳形”垫片和“阴形”垫片同心配合形成周向环形槽组成,所述内嵌倾斜纤维压电传感器,由压电纤维复合材料、电极层、绝缘屏蔽层组成;所述压电纤维复合材料包括倾斜压电纤维、环氧树脂基体;该压电智能垫片利用将内嵌倾斜纤维压电传感器与螺栓的垫片结构进行集成,通过传感器感知联接工件结构的应力应变变化等信息,实现结构损伤实时监测,同时可以监测螺栓预紧力的变化,节省了传感器的布置空间,易于传感器更换,该内嵌倾斜纤维压电传感器较于一般压电元件,具有柔韧性,能够承载一定冲击,减少失效率。
 924
0
924
0
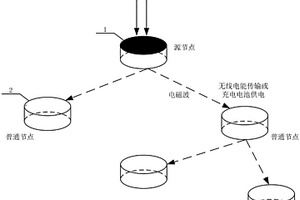
本申请公开了一种深部矿井无线电能传输装置,其特征在于,包括:源节点与普通节点;所述源节点由线缆或井上充电供电,又分为静止源节点和动态源节点;所述静止源节点设置在主巷道到支巷道的入口处,动态源节点为移动设备上的可移动节点,由矿灯蓄电池或设备电源供电,并为其它普通节点提供无线电能传输;所述普通节点可以接收源节点发射的无线电能信息,普通节点间也可相互无线传输信息。本申请降低了恶劣环境下对长距离有线供电限制的要求和事故风险,减少了线缆可改善巷道空间,也使得监测节点布设简便,尤其是在事故发生停电时及有线供电失效的情况下,仍可为井下作业或救援提供监测、通信等服务。
 936
0
936
0
本发明公开了一种基于纠删码的跨中心协同修复方法,技术方案是先构建由数据中心和控制节点组成的分布存储系统,数据中心包括N个存储节点,控制节点为失效数据块Di选择新存储节点LN,向LN发送网络延迟测试请求和存储节点二维数组NSet;LN测试LN与NSet中各存储节点之间的网络延迟,向控制节点发送网络延迟测试结果数组NL;控制节点根据NL选择k个可用数据块及其所在存储节点,k个可用数据块所在的存储节点进行解码计算,被选存储节点所在的数据中心将解码计算结果进行合并,将合并后的结果发送给LN;LN将结果进一步合并得到恢复的Di;控制节点向用户返回修复成功信息。采用本发明可提高大规模分布存储系统的数据修复效率和容错能力。
 1231
0
1231
0
本实用新型公开了一种多点连接部件的高度调节装置。为了解决现有的多点连接部件的高度调节装置难以调平,且连接容易失效的问题,所述多点连接部件的高度调节装置包括第二部件与第一部件;所述第二部件上设有多个竖长条形的安装孔,多组螺栓穿过相应的安装孔并通过螺母将所述第二部件与第一部件固定连接在一起;所述安装孔内设有限制第二部件相对第一部件下移的活块。本实用新型可实现多点连接部件高度的快速调节,且两部件之间的连接更为可靠,检修更为便捷。
北方有色为您提供最新的湖南有色金属分析检测技术理论与应用信息,涵盖发明专利、权利要求、说明书、技术领域、背景技术、实用新型内容及具体实施方式等有色技术内容。打造最具专业性的有色金属技术理论与应用平台!

 2026年03月20日 ~ 22日
2026年03月20日 ~ 22日  2026年03月20日 ~ 22日
2026年03月20日 ~ 22日  2026年03月25日 ~ 27日
2026年03月25日 ~ 27日  2026年03月26日 ~ 28日
2026年03月26日 ~ 28日  2026年03月27日 ~ 29日
2026年03月27日 ~ 29日 





































































