全部
▼
热搜:
 932
932
 0
0
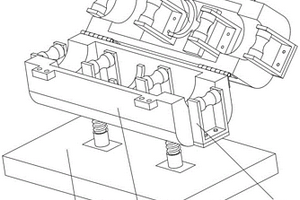
本实用新型涉及矿井救援车技术领域,具体为一种应用于矿井救援车的无损探伤仪装置,包括底座,所述底座的顶部设置有箱体,所述箱体的两侧均转动连接有四个导向装置,所述箱体的内部固定连接有四个导向装置,所述箱体的内部固定连接有两个漏磁通检测器,所述箱体的一侧固定连接有两个合页,所述导向装置包括限位板,所述限位板的顶部固定连接有一个支架,所述支架的中部设置有一个滚轮,所述限位板的一侧开设有两个通孔,每个所述滚轮处于同一平面。本实用新型的优点在于:钢丝绳在两个滚轮的中间,同样箱体内部的滚轮一一相互对应,钢丝绳在通过装置内部,有效的保护探测器内部的探测元件,保证了钢丝绳平稳的通过探测器内部。
 1114
0
1114
0
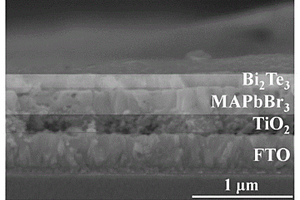
一种钙钛矿多波段探测器及其制备方法,属于光电探测器制造领域。所述探测器的结构依次由透明导电衬底、电子传输层、钙钛矿和六主族铋化物电极组成;所述六主族铋化物为Bi2Se3、Bi2OSe2或Bi2Te3中的一种或多种;所述方法为:取透明导电衬底:采用标准清洗工艺清洁待用;在透明导电衬底上制备电子传输层;采用一步反溶剂旋涂法制备MAPbBr3吸光层;采用热蒸镀方法Bi2Te3电极:真空压强在1‑3×10‑5Torr蒸镀电极。该器件与传统钙钛矿基探测器相比,由于没有有机物作为空穴传输层,提高了热稳定性,使器件可在高温时长时间工作。所采用电极成本比贵金属Au,Ag或者Pt等低,且工艺成熟,具有可见和近红外波段的多光谱探测性能。
 1159
0
1159
0
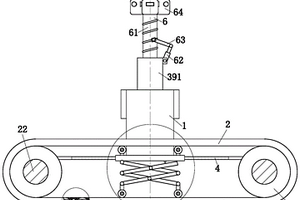
本发明属于机器人技术领域,具体的说是一种行走式矿井探测机器人,包括箱体;还包括行走机构、升降机构、一号轴、固定板、旋转机构、电池组、探照灯、摄像机、信号发射器、激光发射器、激光扫描仪、红外测距仪、生命探测仪、探测传感器和控制器。通过正反转电机带动一号轮转动,使得二号皮带转动,且通过二号皮带上的梯形凸块与二号轮上的齿块间的相互配合,使得二号轮转动,从而使得三号皮带转动;同时,由于伸缩气缸两端分别固连在三号皮带和铰接在推板上,使得推板推动一号固定柱在竖直方向上进行运动,通过控制一号固定柱的升降,对矿井内部环境进行精确的探测,从而提高了探测机器人的实用性。
 1239
0
1239
0
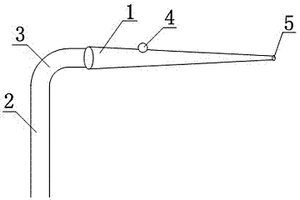
本发明公开了一种矿产勘探开采气枪专用的红外线喷头,包括由不锈钢材料制成的矿产开采喷头主体,所述矿产开采喷头主体的尾部连接有由不锈钢材料制成的连接管,矿产开采喷头主体的头部设有喷头,矿产开采喷头主体的尾部比矿产开采喷头主体的头部大,矿产开采喷头主体上设有红外线瞄准灯。本发明通过红外线瞄准灯可以精确瞄准要切割的钢板或木条,高压空气压缩机通过该矿产开采喷头喷高压气体,将钢板或木条切割掉,速度快,且效率高,通过陶瓷层可以使该矿产开采喷头耐高温,使用寿命更长。
 1123
0
1123
0
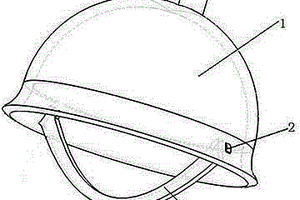
本发明公开了一种瓦斯探测器的矿用安全帽,结构包括:帽体、活动铆钉、佩戴带、探测器、报警器、电源,所述的佩戴带通过活动铆钉安装在帽体上,所述的电源固定安装在帽体的顶端,所述的探测器安装在电源的前部,报警器安装在电源的上部。本发明提出的一种瓦斯探测器的矿用安全帽,采用在安全帽的顶端设置探测器和报警器的设计,达到实时检测矿井内瓦斯浓度的目的,其结构简单,设计合理巧妙,成本低廉,具有广阔的市场前景。
 1209
0
1209
0
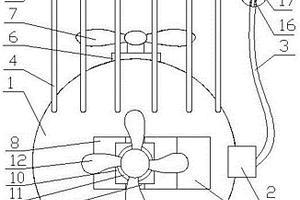
本实用新型涉及一种水下探矿用双螺旋桨机器人。海底潜藏的矿产资源非常丰富,现有的水下探矿设备可控性较差,难以满足水下复杂环境的要求。本实用新型组成包括:装置主体(1),所述的装置主体上部设置有升降电机(6),所述的升降电机与升降螺旋桨(7)配合,所述的装置主体一侧开设有转槽(8),所述的转槽通过转轴(9)与转座转(10)动配合,所述的转座与平移电机(11)配合,所述的平移电机与平移螺旋桨(12)配合,所述的转槽一侧设置有电动油缸(13),所述的电动油缸与所述的转座配合,所述的装置主体一侧设置有安装座(14),所述的安装座上设置有探矿仪(15)。本实用新型应用于水下探矿。
 1119
0
1119
0
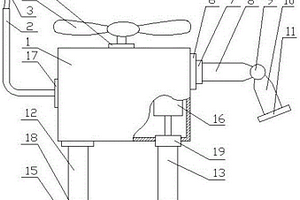
本实用新型涉及一种水下探矿用可行走机器人。海底潜藏的矿产资源非常丰富,现有的水下探矿设备可控性较差,难以满足水下复杂环境的要求。本实用新型组成包括:装置壳体(1),所述的装置壳体上部设置有螺旋桨电机(4),所述的装置壳体前部设置有安装架(6),所述的安装架通过横向舵机(7)与后臂(8)连接,所述的后臂通过纵向舵机(9)与前臂(10)连接,所述的前臂端部设置有探矿仪(11),所述的装置壳体下部设置有一组后腿油缸(12)和一个前腿油缸(13),所述的后腿油缸和所述的前腿油缸均与行走电机(14)连接,所述的前腿油缸与设置在所述的装置壳体内的转弯电机(16)配合。本实用新型应用于水下探矿。
 1031
0
1031
0
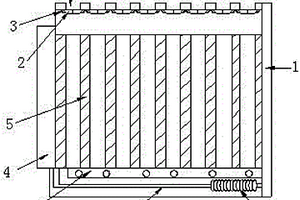
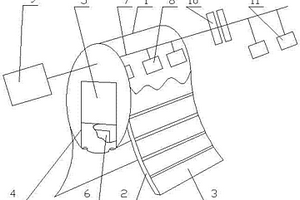
矿山勘探信号传输箱。现有技术中矿业勘探仪器使用发射机和接收机,但连接过程需要手动完成,浪费时间,而且要求接线人员具有一定的工作经验,这种情况下仍然存在错误接头线现象,导致虚连。本发明方法包括:柱形壳体(1),所述的柱形壳体连接两片支板(2),所述的支板上分别排列一组卷板(3),所述的柱形壳体底部具有两道滑槽,所述的滑槽内滑动安装电流感应盒(4),所述的电流感应盒的一侧安装显示屏(5),所述的电流感应盒内安装电流感应器(6),所述的显示屏连接所述的电流感应器;所述的柱形壳体内穿有电缆线(7),所述的电缆线连接一组发射电极(8),所述的电缆线两端分别连接发电机(9)和双面转换接头(10),所述的双面转换接头通过电缆线连接一组接收电极(11)。本发明用于矿山勘探。
本发明公开了一种非对称电极接触诱导自驱动2D钙钛矿单晶光电探测器、制备方法及应用,其中,制备方法包括如下步骤:S1、钙钛矿前驱体溶液的合成:将PEAI与PbI2粉末溶于γ‑丁内酯溶剂中,配置成钙钛矿前驱体溶液;S2、2D钙钛矿单晶的生长:钙钛矿前驱体溶液充分溶解后,以1℃/h的受控冷却降温速率将温度降至60℃,维持5h后,获得漂浮在溶液表面的单晶薄膜;S3、光电探测器的制备:将单晶薄膜取出冲洗;分别制备Ag电极和Pt电极,获得光电探测器;本申请制备方法简单易行,对于制备环境无严格要求且器件稳定,采用本申请方法制备而成的2D钙钛矿单晶光电探测器具有自驱动的特点,不需要外加电源也能够工作。
 819
0
819
0
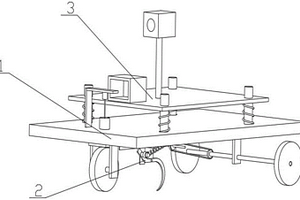
本实用新型提供一种矿用救援探测装置,其有益效果为可以减小井下的颠簸环境对装置造成的影响,可以应对井下可能出现的颠簸情况。本实用新型涉及加工设备技术领域,更具体的说是一种矿用救援探测装置,包括夹持连接架、打磨装置和打气降温装置,其特征在于:包括底板装置、记号机构和探测机构,其特征在于:所述的探测机构连接在底板装置上,记号机构连接在底板装置上,探测机构位于底板装置的上方,记号机构位于底板装置的下方。作为本技术方案的进一步优化,本实用新型一种矿用救援探测装置所述的底板装置包括底板、第一连接板、第一电机、万向轮、第二连接板、连接柱Ⅰ、第三连接板、第二电机、固定板、连接柱Ⅱ和从动轮。
 1089
0
1089
0
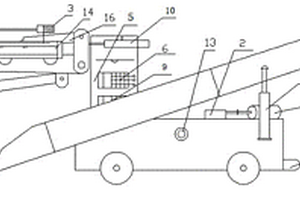
矿用液压探水、扒装一体机。现在炮采掘进工作面出货与探水是两套设备,现要求煤矿逢倔必探;可探水时需撤走工作面设备,在把探水设备运进来安装、调试、进行探水,很是繁琐,工作不方便,浪费很多时间。一种矿用液压探水、扒装一体机,其组成包括:防爆电机(1)连接双联齿轮泵(2),双联齿轮泵具有输出主泵和输出负泵,输出主泵和输出负泵中的两联高压油分别进入操控台(5),所述输出主泵通过一组五联多路阀(6)连接扒装机(7)和探水钻(8),所述输出负泵通过一组四联多路阀(9)连接所述扒装机和刮板运输机。本实用新型用于矿用液压探水、扒装。
 1208
0
1208
0
本发明公开了一种钙钛矿单晶光电探测器及其制备方法,涉及光电探测器技术领域,所述的钙钛矿单晶光电探测器的制备方法,步骤如下:S1.钙钛矿前体溶液的制备;S2.基础MAPbCl3单晶的生长;S3.异质MAPbCl3‑MAPbBr3单晶的生长;S4.钙钛矿单晶光电探测器的制备。本发明提供的钙钛矿单晶光电探测器的制备方法操作简单、技术稳定、对于制备环境无严格要求、原料易得,制得的钙钛矿单晶光电探测器效果优异,空气环境可以保持稳定工作,解决了探测器可以不连接外加电压也能工作这一技术难题。本发明提供的钙钛矿单晶光电探测器具有自驱动的特点、具有较高的光谱响应度和环境稳定性,可用于长期光信号的探测。
 1420
0
1420
0
基于无线传感器网络的矿井搜索探测多机器人系统,本发明涉及矿井及井下事故现场的搜索探测领域,它克服了现有技术不能解决现场环境信息和被困人员信息的快速传递问题。它由以下装置组成:多关节体机器人,它具有蛇形细长结构并采用履带行走方式,具有搭载仓,可携带多个小型侦查机器人,携带的多种传感器能够确定受困矿工的位置、检测出有害气体的种类、有害气体的含量和环境温度;小型侦查机器人,通过沿途的被释放,实现多点信息采集和远距离通讯;远程操控终端,设置在地面上,与多关节体探测机器人和多个小型侦查机器人组成无线传感器网络,搭建起操作者和机器人间的通讯链路;救援人员在远端实时操控机器人各部分的运动,并获取现场环境信息和被困人员信息。
 1053
0
1053
0
本发明公开了一种土壤地球化学在深部矿体勘探方法,包括以下步骤:第一步:先结合测区所具备的成矿地质条件建立土壤地球化学异常模式,分析该测区地质空间成矿作用、控矿因素,把握深部矿体同土壤地球化学异常特征之间的关系;再结合景观地球化学条件包括气候、地形、人文活动等,分析土壤地球化学异常强度、规模等的影响,最终建立起一个附合测区特点的土壤地球化学异常模式;第二步:确定采样类型和深度。本发明的土壤地球化学在深部矿体勘探方法,根据勘探需要和具体情况确定合适的采样类型,采样深度方面,由于部分元素形成异常涉及土壤厚度较大,部分元素形成异常涉及土壤元素较小,根据检测元素采取合理的采样深度,以降低检测噪音的影响。
 852
0
852
0
本发明公开了一种超基性岩红土风化壳的快速找矿勘探方法,包括以下步骤:第一步:获取工作区内地质、构造、岩浆岩等方而的重要信息;第二步:基本了解工作区内的地形、地貌、地层及地质构造特征,合理布置并规划好野外工作路线;第三步:对红土风化壳的垂向分带特征和含矿性进行研究;第四步:对成矿有利地段采用浅井或浅钻工程在风化壳主轴线上进行骨干性解剖和控制;第五步:对确定的成矿区域开展实用而有效的详查与勘探,求获资源储量。本发明的超基性岩红土风化壳的快速找矿勘探方法,对其成矿地质条件进行科学分析,根据野外实际地理、地质条件,合理选择和应用有效性高、针对性强的找矿方法。
 1221
0
1221
0
本发明公开了一种用于矿产勘探和开采的矿石分布绘图尺,它涉及矿产开采辅助用具技术领域,底座上安装有转轴,转轴上分别安装有基准尺与调节转尺,调节转尺上套接有滑块,调节转尺的中部设置有划线槽,滑块的中部安装有笔套,笔套的笔孔与划线槽相对应,底座的内部安装有磁铁,磁铁与铁片相配合;本发明便于携带,操作简便,使用方便,结构简单,功能多样,划线精准。
 1070
0
1070
0
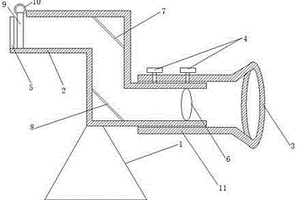
本发明公开了一种矿产勘探专用的便携式矿物成分辨识装置,所述的Z形光路管固定安装在支架上,所述的Z形光路管的右端安装调距筒,调距筒上设置观察锥形口,调距筒能够沿Z形光路管滑动,由此来调节观察锥形口的距离,所述的Z形光路管右端内部安装防尘片,防尘片能够防止外界的灰尘进入Z形光路管,所述的Z形光路管内的直角拐角位置安装第一反射镜和第二反射镜,所述的Z形光路管的左端设置强聚光灯管,强聚光灯管的前部放置矿产样本。本发明采用Z形光路管和调距筒的设计,通过在Z形光路管内的直角拐角位置安装第一反射镜和第二反射镜,利用光学原理,极大减小了矿产样本检查时需要的空间,其结构简单,使用方便。
 841
0
841
0
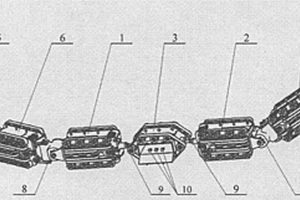
一种适用于煤矿矿井搜索探测的履带式多关节铰接机器人,涉及一种机器人。针对现有机器人存在易倾覆、越障能力差的弊端,本发明提供了一种适用于煤矿矿井搜索探测的履带式多关节铰接机器人,将电源单元模块(1)、控制传感单元模块(2)、搭载单元模块(3)、头部单元模块(4)、尾部单元模块(5)和铰驱动单元模块(6)之间通过铰链连接成为蛇形;在所述各单元模块的外表面都设有履带(7),所述履带(7)都通过各自单元模块的电机控制转动。本发明所述机器人能够翻越相对机器人车体较高的障碍,穿越上下甚至左右都有障碍的一个狭小开放空间,跨越相对机器人车体较长的裂缝,从而进入目标区域执行搜救任务;具有极其强大的移动能力和可靠性,为丰富的感知功能提供了一个健壮的平台。
 1346
0
1346
0
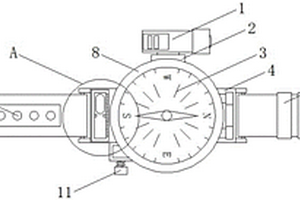
本实用新型公开了一种地质矿产勘查用多功能地质罗盘,包括罗盘,所述罗盘的两侧均固定连接有连接件,两个所述连接件的一侧分别转动连接有母带与子带,所述母带的一侧固定连接有卡扣。本实用新型提供的地质矿产勘查用多功能地质罗盘具有照明灯、防尘盖、子带和母带,照明灯可以小幅度转动,如果勘探者在夜晚缺乏照明的户外时可以应急使用,因为户外环境作业灰尘风沙较大会导致罗盘表面脏污模糊,影响使用者观察指向,防尘盖可以有效的保护罗盘表面防止罗盘正面发生撞击造成损坏,子带和母带配合在一起使用时将以将罗盘固定在手腕上,这样就可以解放勘探者的双手,方便勘探者做别的事情,让罗盘更加方便携带、观察。
 1258
0
1258
0
本申请公开了一种绿色矿山用的地质勘探的钻杆装置,包括第一弧形空心杆与第二弧形空心杆,所述第一弧形空心杆固定设有第一通孔,所述第一通孔滑动插接第二插接杆的一端,所述第二插接杆的另一端固定连接第二弧形空心杆侧壁,所述第二插接杆滑动插接第一通孔的一端螺纹连接第二螺纹帽,所述第一弧形空心杆外壁固定连接第一螺纹圈。通过第一弧形空心杆与第二弧形空心杆的设置,在第一弧形空心杆与第二弧形空心杆拼接成转杆之后,形成一个空心转杆,进而随着转动不断下降,进入转杆内部的土壤不断上升,在土壤取出后,将相互拼接的第一弧形空心杆与第二弧形空心杆进行拆开,进而可以清晰看到整个土层的变化,进而便于对地质土层的研究。
 1212
0
1212
0
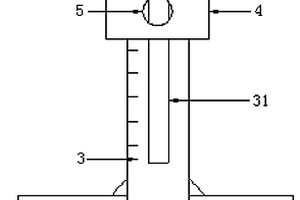
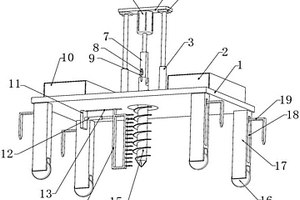
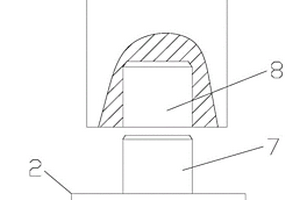
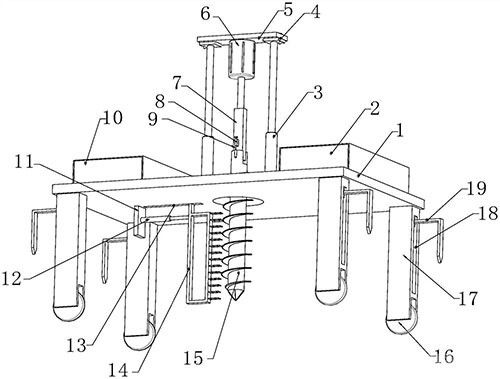
本实用新型涉及地质探矿技术领域,具体是一种地质探矿用便携式钻孔装置,包括底部外壁四角固定安装有支腿的工作台,所述工作台的上方设置有折叠式钻孔组件,且折叠式钻孔组件包括顶板,所述顶板的底部外壁固定安装有旋转电机,且旋转电机的输出轴通过联轴器连接有延伸轴杆,所述延伸轴杆的底端设置有钻杆,且钻杆的顶端开设有凹口,所述凹口与延伸轴杆之间通过活动轴相连接;本实用新型利用设置的折叠式钻孔组件,在日常携带运输过程中,能够将顶板连同下方部件拆下,此时,将螺纹插销取下,便能够将延伸轴杆与钻杆相折叠,可通过设置的存放箱一进行收纳,从而有效减少了该钻孔装置的空间占用率,方便日常的运输、携带。
 3203
0
3203
0
地质探矿指的是对生产矿山是指为增加新的金矿储量,延长矿山服务年限,并为进一步查明地质构造、水文地质而在生产矿区内部及其外围所进行的地质探矿工程。地质探矿过程中常常需要进行钻孔处理。
中冶有色为您提供最新的黑龙江哈尔滨有色金属探矿技术理论与应用信息,涵盖发明专利、权利要求、说明书、技术领域、背景技术、实用新型内容及具体实施方式等有色技术内容。打造最具专业性的有色金属技术理论与应用平台!


 2025年11月07日 ~ 09日
2025年11月07日 ~ 09日  2025年11月14日 ~ 16日
2025年11月14日 ~ 16日 碳材料科技大会") 2025年11月14日 ~ 16日
2025年11月14日 ~ 16日  2025年11月14日 ~ 16日
2025年11月14日 ~ 16日  2025年11月21日 ~ 23日
2025年11月21日 ~ 23日 


有限公司")
有限公司/国家轻金属质量检验检测中心")

































































