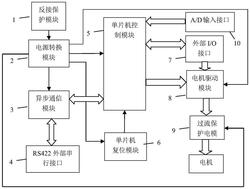
权利要求书: 1.红外热像仪两轴伺服电机控制器,其特征在于,由反接保护模块(1)、电源转换模块(2)、异步通信模块(3)、RS422外部串行接口(4)、单片机控制模块(5)、单片机复位模块(6)、外部I/O接口(7)、电机驱动模块(8)和过流保护模块(9)组成;
电源转换模块(2)通过过流保护模块(9)与外部电源连接;
反接保护模块(1)和电源转换模块(2)相连,用于防止电源反接;
电源转换模块(2)还分别与异步通信模块(3)、单片机控制模块(5)、单片机复位模块(6)和电机驱动模块(8)相连,用于外部电源电压到低电压的转换,为与异步通信模块(3)、单片机控制模块(5)、单片机复位模块(6)和电机驱动模块(8)提供所需输入电压;
单片机复位模块(6)与单片机控制模块(5)相连,用于控制单片机控制模块(5)复位;
单片机控制模块(5)通过异步通信模块(3)与RS422外部串行接口(4)相连;
单片机控制模块(5)还直接与外部A/D输入接口(10)相连,接受外部
传感器返回的模拟信号;
单片机控制模块(5)通过外部I/O接口(7)与电机驱动模块(8)相连,用于输出驱动模式和电机方向控制信号,还用于得到电机限位信号;
单片机控制模块(5)还直接与电机驱动模块(8)相连;电机驱动模块(8)通过过流保护模块(9)与电机连接;
单片机控制模块(5)通过外部A/D输入接口(10)对红外热像仪温度传感器和焦距位置传感器模拟信号进行采集;采集得到的数据经过单片机控制模块(5)处理计算后,单片机控制模块(5)分别将得到的PWM脉宽调制波直接输出给电机驱动模块(8),将方向和模式信号通过外部I/O接口(7)输出给电机驱动模块(8),从而实现对电机的伺服控制;
单片机控制模块(5)内部包括五个功能模块,分别是A/D采集与转换模块(501)、通信模块(502)、主控模块(503)、伺服控制模块(504)和内部FLASH存储模块(505);
其中,主控模块(503)分别与A/D采集与转换模块(501)、通信模块(502)、伺服控制模块(504)和内部FLASH存储模块(505)相连,用于控制通信模块(502)、主控模块(503)、伺服控制模块(504)和内部FLASH存储模块(505)的工作;
A/D采集与转换模块(501)完成对红外热像仪焦距位置传感器和温度传感器的模拟信号采集和转换,之后将结果传送给主控模块(503),并存储于内部FLASH存储模块(505)中;
通信模块(502)通过中断方式接收上位机发送的串口控制指令,完成串口信息的接受、校验、存储,同时在电机控制完成后将焦距和温度信息发送返回给上位机;
内部FLASH存储模块(505)由主控模块(503)调度完成存储和读取温度和焦距信息;
伺服控制模块(504)调用A/D采集与转换模块(501)得到的焦距位置信息和实时温度信息进行计算,之后通过计算结果调制输出两路电机的PWM控制信号;在完成电机的运动控制后,A/D采集与转换模块(501)采集当前红外热像仪工作温度和焦距信息,通过通信模块(502)输出标准UART信号给异步通信模块(3),异步通信模块(3)转换为标准RS422通信格式信息返回给上位机;
伺服控制模块(504)调用A/D采集与转换模块(501)得到的焦距位置信息和实时温度信息按下式进行计算:Ci=Kp(Pi?Pc)+Ki(Pi?Pc)+Kd(Pi?Pc)+Kc(Pi?Pc)+Kt(Pi?Pc)式中,Ci为当前控制信号计算值;
Pi为当前焦距位置;
Pc为命令控制目标位置;
Kp为控制比例因子;
Ki为控制积分因子;
Kd为控制微分因子;
Kc为控制修正因子;
Kt为控制温度补偿校正因子;
之后根据计算结果调制输出两路电机的PWM控制信号;在完成电机的运动控制后,A/D采集与转换模块(501)采集当前红外热像仪工作温度和焦距信息,通过通信模块(502)输出标准UART信号给异步通信模块(3),异步通信模块(3)转换为标准RS422通信格式信息返回给上位机;
工作过程为:由单片机复位模块提供复位信号给单片机控制模块,单片机控制模块内程序复位,主控模块从内部FLASH存储模块内读取之前存入的温漂校正温度和焦距位置信息,并将数据存入FLASH存储模块内的指定寄存器;之后处于等待串口命令状态,由RS422外部串行接口接收来自上位机的标准RS422串行通信信号,由异步通信模块将RS422格式电平信号转换成符合单片机控制模块要求的电平信号;单片机控制模块检测到有数据输入时,产生UART接收中断接收串口命令信息,并将数据存入指定的接收寄存器;由主控模块读取接收寄存器,并分析命令数据,将对应控制位和标志旗语置位;同时,由单片机控制模块通过外部A/D输入接口对温度和位置传感器的模拟信号进行采集和转换,并将转换结果存入本模块的直接存储寄存器DMA中;主控模块根据控制的置位情况确定要执行的功能,从DMA中取出当前温度和焦距位置信息,依次与内部FLASH存储模块内寄存器中的温漂校正温度和位置信息进行比较,采取校正、补偿方法计算出两路电机的目标位置,再根据伺服控制算法将目标位置转换为PWM的控制量;由伺服控制模块根据控制量和焦距位置的实时ADC结果,采取中断控制的方式,处理输出脉宽调制波PWM、电机方向和模式信号;电机驱动模块接收脉宽调制波PWM、电机方向和模式信号,根据方向和模式选择,处理输出两路经过放大相位相反的电机驱动信号,实现电机多种形式的伺服控制。
2.根据权利要求1所述的红外热像仪两轴伺服电机控制器,其特征在于,单片机控制模块(5)采用Microchip公司的高性能16位数字信号控制器dsPIC33FJ128MC802。
3.根据权利要求1所述的红外热像仪两轴伺服电机控制器,其特征在于,电机驱动模块(8)采用TI公司的全桥电机驱动器DR8800。
4.根据权利要求1所述的红外热像仪两轴伺服电机控制器,其特征在于,异步通信模块(3)采用MAXIM美信公司的线路收发器MAX3488ESA。
5.根据权利要求1所述的红外热像仪两轴伺服电机控制器,其特征在于,单片机复位模块(6)采用MAXIM美信公司的复位
芯片MAX809。
说明书: 红外热像仪两轴伺服电机控制器技术领域[0001] 本发明属于伺服控制技术领域,涉及一种红外热像仪两轴伺服电机控制器,具体涉及一种用于热像仪变倍调焦机构中基于单片机的两轴直流电机伺服运动控制装置。背景技术[0002] 目前直流电机在伺服控制技术在工业生产中有着广泛的应用。与机器人和数控机床等应用领域相比,在红外热像仪中伺服控制的最大特点是电机数量不多,一般控制的都是直流电机,但由于热像仪小型化、轻便化的不断发展,要求控制器的体积和重量也不断减小,为此在热像仪中的伺服控制器不能一味的追求数据处理速度和运算能力。虽然数字信号处理器(DigitalSignalProcessor)在性价比、稳定性、数据处理能力和运算速度等方面都具有强劲的优势,但其芯片体积却相对较大,而对于热像仪伺服控制运算来说,其强大的运算能力也算是一种浪费。而对于设计较为灵活的FPGA,由于其各种功能都需要用户自己设计,不但工作量很大而且接口设计复杂,同时芯片自身体积也不小,自然造成控制器电路板体积增大。为此,采用既能满足控制器外围接口需求,又能满足PID控制运算能力需求,且芯片体积较小、价格合适的单片机来设计直流电机伺服控制器,才是当前热像仪伺服运动控制器的追求目标。发明内容[0003] 本发明的目的是为了解决现有技术的不足,提供红外热像仪两轴伺服电机控制器,该控制器具有高集成度和性价比,结构设计简单,采用单片机即能实现对电机位移数据的校正、补偿等伺服控制算法的处理,然后调制输出脉宽调制波(PWM)对热像仪伺服直流电机进行控制,系统控制精度高、集成度高、体积小、重量轻,易于调试和维修,能普遍适用于大部分热像仪的伺服控制系统设计。[0004] 为实现上述目的,本发明采用的技术方案如下:[0005] 红外热像仪两轴伺服电机控制器,包括反接保护模块、电源转换模块、异步通信模块、RS外部串行接口、单片机控制模块、单片机复位模块、外部I/O接口、电机驱动模块和过流保护模块;[0006] 反接保护模块和电源转换模块相连,用于防止电源反接,若有反接现象发生,电路不启动,以起到保护作用;[0007] 电源转换模块通过过流保护模块与外部电源连接;[0008] 电源转换模块还分别与异步通信模块、单片机控制模块、单片机复位模块和电机驱动模块相连,用于外部电源电压到低电压的转换,为与异步通信模块、单片机控制模块、单片机复位模块和电机驱动模块提供所需输入电压;[0009] 单片机复位模块与单片机控制模块相连,用于控制单片机控制模块复位;[0010] 单片机控制模块通过异步通信模块与RS外部串行接口相连;[0011] 单片机控制模块还直接与外部A/D输入接口相连,接受外部传感器返回的模拟信号;[0012] 单片机控制模块通过外部I/O接口与电机驱动模块相连,用于输出驱动模式和电机方向控制信号,还用于得到电机限位信号或相关控制信号;[0013] 单片机控制模块还直接与电机驱动模块相连;电机驱动模块通过过流保护模块与电机连接;[0014] 单片机控制模块通过外部A/D输入接口对红外热像仪温度传感器和焦距位置传感器模拟信号进行采集;采集得到的数据经过单片机控制模块处理计算后,单片机控制模块分别将得到的PWM脉宽调制波直接输出给电机驱动模块,将方向和模式信号通过外部I/O接口输出给电机驱动模块,从而实现对电机的伺服控制。[0015] 进一步,优选的是,单片机控制模块内部包括五个功能模块,分别是A/D采集与转换模块、通信模块、主控模块、伺服控制模块和内部FLASH存储模块;[0016] 其中,主控模块分别与A/D采集与转换模块、通信模块、主控模块、伺服控制模块和内部FLASH存储模块相连,用于控制通信模块、主控模块、伺服控制模块和内部FLASH存储模块的工作;[0017] A/D采集与转换模块完成对红外热像仪焦距位置传感器和温度传感器的模拟信号采集和转换,之后将结果传送给主控模块,并存储于内部FLASH存储模块中;[0018] 通信模块通过中断方式接收上位机发送的串口控制指令,完成串口信息的接受、校验、存储,同时在电机控制完成后将焦距和温度信息发送返回给上位机;[0019] 内部FLASH存储模块由主控模块调度完成存储和读取温度和焦距信息;[0020] 伺服控制模块调用A/D采集与转换模块得到的焦距位置信息和实时温度信息进行计算,之后通过计算结果调制输出两路电机的PWM控制信号;在完成电机的运动控制后,A/D采集与转换模块采集当前红外热像仪工作温度和焦距信息,通过通信模块输出标准UART信号给异步通信模块,异步通信模块转换为标准RS通信格式信息返回给上位机。[0021] 进一步,优选的是,伺服控制模块调用A/D采集与转换模块得到的焦距位置信息和实时温度信息按下式进行计算:[0022] Ci=Kp(Pi?Pc)+Ki(Pi?Pc)+Kd(Pi?Pc)+Kc(Pi?Pc)+Kt(Pi?Pc)[0023] 式中,Ci为当前控制信号计算值;[0024] Pi为当前焦距位置;[0025] Pc为命令控制目标位置;[0026] Kp为控制比例因子;[0027] Ki为控制积分因子;[0028] Kd为控制微分因子;[0029] Kc为控制修正因子;[0030] Kt为控制温度补偿校正因子;[0031] 之后根据计算结果调制输出两路电机的PWM控制信号;在完成电机的运动控制后,A/D采集与转换模块采集当前红外热像仪工作温度和焦距信息,通过通信模块输出标准UART信号给异步通信模块,异步通信模块转换为标准RS422通信格式信息返回给上位机。[0032] 进一步,优选的是,单片机控制模块采用Microchip公司的高性能16位数字信号控制器dsPIC33FJ128MC802。[0033] 进一步,优选的是,电机驱动模块采用TI公司的全桥电机驱动器DR8800。[0034] 进一步,优选的是,异步通信模块采用MAXIM美信公司的线路收发器MAX3488ESA。[0035] 进一步,优选的是,单片机复位模块采用MAXIM美信公司的复位芯片MAX809。[0036] 本发明与现有技术相比,其有益效果为:[0037] 本发明采用性能满足要求的单片机作为核心控制器件,附以少数外部驱动和保护模块进行两路电机的精确控制。控制器集成度高、结构简单、体积小、重量轻,稳定性和抗干扰性能好,并具有PWM的占空比、频率、死区时间可调等特性,是一种功能丰富、易于调试、接口丰富、针对性强、质优价低(价格由数千元量级降低到千元左右)的两轴伺服控制器。该控制器资源利用率高,适应性强,在降低了成本的同时,体积减小(电路板尺寸由60mmx60mm缩小到45mmx45mm)而拓宽了在红外热像仪伺服控制系统设计中的应用范围。附图说明[0038] 图1是本发明的结构示意图,也是说明书摘要附图。[0039] 图2是本发明的单片机控制各模块相互关系图。[0040] 图3是本发明的单片机电路原理图。[0041] 图4是本发明的电机驱动模块电路原理图。[0042] 其中,1、反接保护模块;2、电源转换模块;3、异步通信模块;4、RS422外部串行接口;5、单片机控制模块;6、单片机复位模块;7、外部I/O接口;8、电机驱动模块;9、过流保护模块;501、A/D采集与转换模块;502、通信模块;503、主控模块;504、伺服控制模块;505、内部FLASH存储模块。具体实施方式[0043] 下面结合实施例对本发明作进一步的详细描述。[0044] 本领域技术人员将会理解,下列实施例仅用于说明本发明,而不应视为限定本发明的范围。实施例中未注明具体技术或条件者,按照本领域内的文献所描述的技术或条件或者按照产品说明书进行。所用材料或设备未注明生产厂商者,均为可以通过购买获得的常规产品。[0045] 本领域技术人员将会理解,下列实施例仅用于说明本发明,而不应视为限定本发明的范围。实施例中未注明具体技术、连接关系或条件者,按照本领域内的文献所描述的技术、连接关系、条件或者按照产品说明书进行。所用材料、仪器或设备未注明生产厂商者,均为可以通过购买获得的常规产品。[0046] 本技术领域技术人员可以理解,除非特意声明,这里使用的单数形式“一”、“一个”、“所述”和“该”也可包括复数形式。应该进一步理解的是,本发明的说明书中使用的措辞“包括”是指存在所述特征、整数、步骤、操作、元件和/或组件,但是并不排除存在或添加一个或多个其他特征、整数、步骤、操作、元件、组件和/或它们的组。应该理解,当我们称元件被“连接”或“耦接”到另一元件时,它可以直接连接或耦接到其他元件,或者也可以存在中间元件。此外,这里使用的“连接”或“耦接”可以包括无线连接或耦接。[0047] 在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。术语“内”、“上”、“下”等指示的方位或状态关系为基于附图所示的方位或状态关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。[0048] 在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“连接”、“设有”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,根据具体情况理解上述术语在本发明中的具体含义。[0049] 本技术领域技术人员可以理解,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。[0050] 实施例1[0051] 如图1 2所示,红外热像仪两轴伺服电机控制器,其特征在于,包括反接保护模块~1、电源转换模块2、异步通信模块3、RS422外部串行接口4、单片机控制模块5、单片机复位模块6、外部I/O接口7、电机驱动模块8和过流保护模块9;
[0052] 反接保护模块1和电源转换模块2相连,用于防止电源反接,若有反接现象发生,电路不启动,以起到保护作用;[0053] 电源转换模块2通过过流保护模块9与外部电源连接;[0054] 电源转换模块2还分别与异步通信模块3、单片机控制模块5、单片机复位模块6和电机驱动模块8相连,用于外部电源电压到低电压的转换,为与异步通信模块3、单片机控制模块5、单片机复位模块6和电机驱动模块8提供所需输入电压;[0055] 单片机复位模块6与单片机控制模块5相连,用于控制单片机控制模块5复位;[0056] 单片机控制模块5通过异步通信模块3与RS422外部串行接口4相连;[0057] 单片机控制模块5还直接与外部A/D输入接口10相连,接受外部传感器返回的模拟信号;[0058] 单片机控制模块5通过外部I/O接口7与电机驱动模块8相连,用于输出驱动模式和电机方向控制信号,还用于得到电机限位信号或相关控制信号;[0059] 单片机控制模块5还直接与电机驱动模块8相连;电机驱动模块8通过过流保护模块9与电机连接;[0060] 单片机控制模块5通过外部A/D输入接口10对红外热像仪温度传感器和焦距位置传感器模拟信号进行采集;采集得到的数据经过单片机控制模块5处理计算后,单片机控制模块5分别将得到的PWM脉宽调制波直接输出给电机驱动模块8,将方向和模式信号通过外部I/O接口7输出给电机驱动模块8,从而实现对电机的伺服控制。[0061] 实施例2[0062] 如图1 2所示,红外热像仪两轴伺服电机控制器,其特征在于,包括反接保护模块~1、电源转换模块2、异步通信模块3、RS422外部串行接口4、单片机控制模块5、单片机复位模块6、外部I/O接口7、电机驱动模块8和过流保护模块9;
[0063] 反接保护模块1和电源转换模块2相连,用于防止电源反接,若有反接现象发生,电路不启动,以起到保护作用;[0064] 电源转换模块2通过过流保护模块9与外部电源连接;[0065] 电源转换模块2还分别与异步通信模块3、单片机控制模块5、单片机复位模块6和电机驱动模块8相连,用于外部电源电压到低电压的转换,为与异步通信模块3、单片机控制模块5、单片机复位模块6和电机驱动模块8提供所需输入电压;[0066] 单片机复位模块6与单片机控制模块5相连,用于控制单片机控制模块5复位;[0067] 单片机控制模块5通过异步通信模块3与RS422外部串行接口4相连;[0068] 单片机控制模块5还直接与外部A/D输入接口10相连,接受外部传感器返回的模拟信号;[0069] 单片机控制模块5通过外部I/O接口7与电机驱动模块8相连,用于输出驱动模式和电机方向控制信号,还用于得到电机限位信号或相关控制信号;[0070] 单片机控制模块5还直接与电机驱动模块8相连;电机驱动模块8通过过流保护模块9与电机连接;[0071] 单片机控制模块5通过外部A/D输入接口10对红外热像仪温度传感器和焦距位置传感器模拟信号进行采集;采集得到的数据经过单片机控制模块5处理计算后,单片机控制模块5分别将得到的PWM脉宽调制波直接输出给电机驱动模块8,将方向和模式信号通过外部I/O接口7输出给电机驱动模块8,从而实现对电机的伺服控制。[0072] 单片机控制模块5内部包括五个功能模块,分别是A/D采集与转换模块501、通信模块502、主控模块503、伺服控制模块504和内部FLASH存储模块505;[0073] 其中,主控模块503分别与A/D采集与转换模块501、通信模块502、伺服控制模块504和内部FLASH存储模块505相连,用于控制通信模块502、主控模块503、伺服控制模块504和内部FLASH存储模块505的工作;
[0074] A/D采集与转换模块501完成对红外热像仪焦距位置传感器和温度传感器的模拟信号采集和转换,之后将结果传送给主控模块503,并存储于内部FLASH存储模块505中;[0075] 通信模块502通过中断方式接收上位机发送的串口控制指令,完成串口信息的接受、校验、存储,同时在电机控制完成后将焦距和温度信息发送返回给上位机;[0076] 内部FLASH存储模块505由主控模块503调度完成存储和读取温度和焦距信息;[0077] 伺服控制模块504调用A/D采集与转换模块501得到的焦距位置信息和实时温度信息进行计算,之后通过计算结果调制输出两路电机的PWM控制信号;在完成电机的运动控制后,A/D采集与转换模块501采集当前红外热像仪工作温度和焦距信息,通过通信模块502输出标准UART信号给异步通信模块3,异步通信模块3转换为标准RS422通信格式信息返回给上位机。[0078] 伺服控制模块504调用A/D采集与转换模块501得到的焦距位置信息和实时温度信息进行计算时,可以采用如下公式,但不限于此:[0079] Ci=Kp(Pi?Pc)+Ki(Pi?Pc)+Kd(Pi?Pc)+Kc(Pi?Pc)+Kt(Pi?Pc)[0080] 式中,Ci为当前控制信号计算值;[0081] Pi为当前焦距位置;[0082] Pc为命令控制目标位置;[0083] Kp为控制比例因子;[0084] Ki为控制积分因子;[0085] Kd为控制微分因子;[0086] Kc为控制修正因子;[0087] Kt为控制温度补偿校正因子;[0088] Kp、Ki、Kd、Kc、Kt均为常数。[0089] 本发明的红外热像仪两轴伺服电机控制器由单片机作为核心控制器件,通过标准422串口实现与上位机或下位机的通信联路,能够完成两路电机的伺服控制,同时完成位置传感器和温度传感器信号的采集。
[0090] 应用于红外热像仪伺服控制领域,目前基于数字信号处理器(DigitalSignalProcessor)或现场可编程门阵列(FieldProgrammableGateArray)的伺服控制器设计都需要附加很多外围接口电路,虽然程序运行能力强大、运算处理速度快,但结构复杂、成本高、集成度低,芯片体积大而造成控制器板级设计无法减小,对于红外热像仪伺服控制领域来说,资源利用率低,应用范围窄,较为专用,设计效率低。[0091] 热像仪两轴伺服控制器通过单片机控制模块5对外部A/D输入接口10的温度和焦距位置传感器模拟信号进行采集,经过单片机控制模块5处理计算后,分别将PWM脉宽调制波直接输出给电机驱动模块8,将方向和模式信号通过外部I/O接口7输出给电机驱动模块8,电机驱动模块8根据所选模式输出驱动电机的一对反相的开关控制信号,实现两路电机的伺服控制,完成光学系统的调焦与变倍。
[0092] 单片机控制模块5采用Microchip公司的高性能16位数字信号控制器dsPIC33FJ128MC802,电机驱动模块8采用TI公司的全桥电机驱动器DR8800,异步通信模块
3采用MAXIM美信公司的线路收发器MAX3488ESA,单片机复位模块6采用MAXIM美信公司的复位芯片MAX809。
[0093] 单片机控制模块5的数字信号控制器最高工作速度可达40MIPS,具有片上闪存和SRAM等存储空间,片内模数转换器可实现2路12位或4路10位ADC输入同时采样,带有比较器模块和电机控制外设模块可实现电机的控制编程,丰富的外设配置能满足红外热像仪两轴伺服控制的要求。该芯片只有28个引脚,但由于可实现引脚复用功能,虽然封装尺寸小,却有很多种功能。其中有21个I/O引脚,有16个引脚与外设功能引脚共用,可实现重映射,数字I/O输出可驱动3.0?3.6的电压。有6个ADC通道,6个ADC输入引脚,都与编程或参考电压引脚复用,需要根据需求合理选择引脚映射。该数字信号控制器有丰富的外设,在红外热像仪两轴伺服控制器设计中只用到:模数转换器ADC、数字I/O、输出比较、UART通信。该单片机尺寸小功能多的特点,使红外热像仪两轴伺服控制器尺寸大大减小,同时省去外围很多复杂的电路模块。由于该控制器体积小,但却能满足很多功能需求,因此能应用到更多样的热像仪中去,提高伺服控制器的通用性。[0094] 如图2所示,单片机控制模块5内部包含五个功能模块,分别是A/D采集与转换模块501、通信模块502、主控模块503、伺服控制模块504和内部FLASH存储模块505,其中主控模块调度管理其他四个模块的运行;伺服控制模块504根据其他四个模块提供的相关信息,对温度补偿和PID控制进行计算处理,通过中断控制方式设置单片机控制外设模块输出脉宽调制波;
[0095] 单片机控制模块5的2路UART通信4个引脚分别与异步通信模块3的2个MAX3488的输入和输出相连,两路RS422串口通信链路可以分别连接上位机和下位机,或是连接两个上位机,一个为主控上位机,一个为调试上位机;单片机控制模块5的3路ADC输入分别与1路温度传感器和2路位置传感器相连;单片机控制模块5的输出比较模块调制PWM输出,选择2个数字I/O引脚映射为输出比较功能,将这两个引脚分别与电机驱动模块8的两片DR8800的ENABLE引脚相连;而控制电机方向和模式的信号通过2个普通数字I/O引脚输出,分别与电机驱动模块8的两片DR8800的PHASE和MODE引脚相连;外部20M晶振与单片机控制模块5的时钟输入引脚相连;单片机控制模块5的MCLR+引脚与单片机复位模块6的MAX809相连实现上电的程序复位;单片机控制模块5的DD、GND、ADD、ASS和参考电压引脚分别与由电源转换模块2转换得到的对应电压连接,提供给ADC转换所用的参考电压为2.5;电机驱动模块8的两片DR8800与过流保护模块9相连,防止外部信号异常或电机堵转等情况损坏电路。本发明具备过流保护功能,一旦出现异常情况发生过流,保护电路部分即刻启动,为电机断电,保证安全。[0096] 本发明使用DR8800全桥电机驱动器,直接使用PWM脉宽调制波作为输入控制直流电机,能够提供一对峰值电流可达±2.8A、驱动电压可达36的驱动信号。通过I/O输入PHASE和MODE,PWM输入ENABLE就能控制电机的方向和速度,同时提供低电流保护和低功耗模式,使电机驱动设计得到很大的简化。采用MAX3488ESA的线路收发器,转换输入输出标准RS422/RS485的串口通信格式,其功耗低、单电源供电3.3、有过载保护、无需外接元器件,共模输入范围在?7 +12之间,10Mbps的低比特率限制,应用范围较广,并能按信号流向的~引脚配置以优化PCB布板。
[0097] 控制器ADC接口简单,针对不同类型的红外热像仪伺服控制系统,该控制器可连接多种不同类型的传感器,如线性电位器位置传感器、编码器、二极管型温度传感器和霍尔器件等。该控制器能同时实现一种或两种轴向运动及打入/打出调焦和变倍控制,从而较广泛的适用于红外热像仪伺服控制系统设计。[0098] 本发明的工作过程:红外热像仪两轴伺服控制器上电工作,由单片机复位模块6提供复位信号给单片机控制模块5,单片机控制模块5内程序复位,主控模块503从内部FLASH存储模块505内读取之前存入的温漂校正温度和焦距位置信息,并将数据存入FLASH存储模块505内的指定寄存器;之后处于等待串口命令状态,由RS422外部串行接口接收来自上位机的标准RS422串行通信信号,由异步通信模块3将RS422格式电平信号转换成符合单片机控制模块5要求的电平信号;单片机控制模块5检测到有数据输入时,产生UART接收中断接收串口命令信息,并将数据存入指定的接收寄存器;由主控模块503读取接收寄存器,并分析命令数据,将对应控制位和标志旗语置位;同时,由单片机控制模块5通过外部A/D输入接口10对温度和位置传感器的模拟信号进行采集和转换,并将转换结果存入本模块的直接存储寄存器DMA(DirectMemoryAccess)中;主控模块503根据控制的置位情况确定要执行的功能,从DMA中取出当前温度和焦距位置信息,依次与内部FLASH存储模块505内寄存器中的温漂校正温度和位置信息进行比较,采取校正、补偿等方法计算出两路电机的目标位置,再根据伺服控制算法将目标位置转换为PWM的控制量;由伺服控制模块504根据控制量和焦距位置的实时ADC结果,采取中断控制的方式,处理输出脉宽调制波PWM、电机方向和模式信号;电机驱动模块8接收脉宽调制波PWM、电机方向和模式信号,根据方向和模式选择,处理输出两路经过放大相位相反的电机驱动信号,实现电机多种形式的伺服控制。该控制器主要用于红外热像仪的调焦和变倍控制,也可用于其它需要直流电机完成的伺服控制,由于其在功能保证的情况下板级尺寸大幅减小,将使其应用范围更加广泛。[0099] 以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
声明:
“红外热像仪两轴伺服电机控制器” 该技术专利(论文)所有权利归属于技术(论文)所有人。仅供学习研究,如用于商业用途,请联系该技术所有人。
我是此专利(论文)的发明人(作者)
 915
编辑:管理员
来源:昆明物理研究所
915
编辑:管理员
来源:昆明物理研究所



 咨询细节
咨询细节















































































 2026年08月06日 ~ 08日
2026年08月06日 ~ 08日 




















