
全部
▼
热搜:
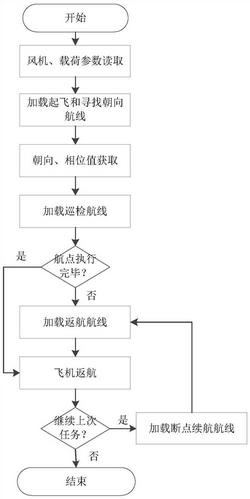
本发明提供了一种无人机自主风机巡检系统的作业流程,包括读取风机和无人机载荷数据,根据参数进行起飞和寻找朝向航线规划,执行朝向查找任务,获取朝向和相位值,进行巡检航线规划,根据监控模块,实时监控无人机航线以及无人机电压信息,判断航点是否执行完毕,若未执行完任务前无人机电量不足,必须返航,执行无人机返航规划流程,实现无人机安全着陆,执行完任务,无人机自动返航,安全着陆,未执行完任务,无人机返航后,整顿完成后,执行原来任务,读取上次任务的航线以及执行到的航点索引,进行断点续航航线规划流程,执行后续任务。本发明可适配多型无人机,提高风电机组的巡检效率,降低对巡检人员的要求,实现风电机组巡检的智能化、无人化巡检。



































































 广西 - 南宁
广西 - 南宁 2024年08月20日 ~ 22日
2024年08月20日 ~ 22日



